
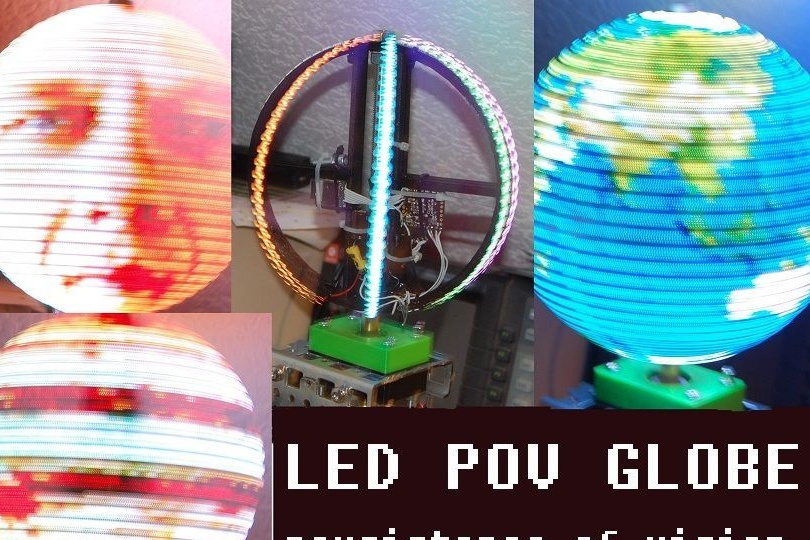
Tento tutoriál je o tom, ako zostaviť POV zemeguli s menšou cenou. elektronický súčasti ako iné podobné zariadenia. Použitím RGB LED s integrovaným ovládačom APA102. To vám ušetrí spájkovanie mnohých drôtov. Môžete si o nich prečítať viac. Tieto diódy LED nepotrebujú ďalší ovládač. Sú priamo spojené s mikrokontrolérom dvoma spôsobmi. To vám umožní veľmi rýchlo prepínať LED. Ak chcete získať stabilný obraz, synchronizácia SPI prichádza s frekvenciou 10 MHz. Ďalším plusom tohto dizajnu je použitie flash karty, ktorá ukladá obrázok vo formáte BMP.
1 Potrebné materiály

Pre os zemegule budete potrebovať:

1. Čap so závitom M8 a dĺžkou 250 mm
2. Matica M8
3. Mosadzné puzdro dlhé 10 mm a 100 mm
4. Plastové podložky 8 mm 2 kusy (súčasťou balenia STL)
5. spojka pre tých, ktorí budú používať krokový motor NEMA 17
Na napájanie krúžku LED na hriadeli budete potrebovať
1. guličkové ložisko 6300 (10x35x11)
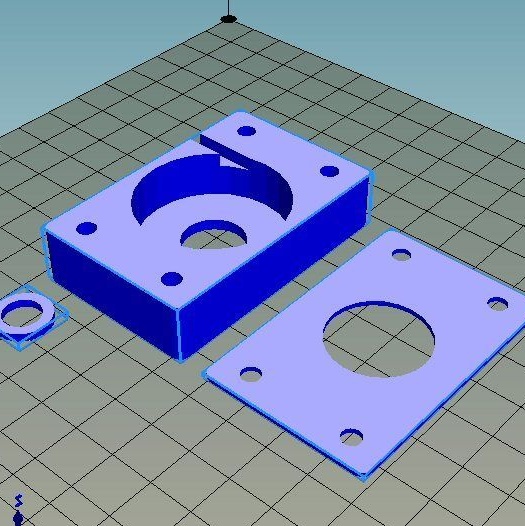
2. dve konzoly pre ložiská. Vytlačené na 3D tlačiarni alebo vyrobené z dreva.
3. Štyri skrutky M4x40 s maticami
4. Tipy na drôty 2 ks 8 mm
5. s priemerom hriadeľa 5 mm
6. 4 skrutky M4 na upevnenie motora
7. možno na to fanúšik.
Alternatívne môžete použiť akýkoľvek motor so správnym nastavením krútiaceho momentu a otáčok. Motor použitý v tejto konštrukcii má maximálny krútiaci moment pri prúde 50 A, ale maximálna spotreba prúdu počas prevádzky je iba 18 A.
Na ovládanie ovládača servomotora použite
1.
2. dve tlačidlá
Napájanie 12V pre motor a 5V pre LED. Ako napájací zdroj môžete používať starú jednotku z počítača. Môžete si kúpiť 12 V / 5A napájací zdroj a pripojiť sa k nemu
Na prsteň LED budete potrebovať:
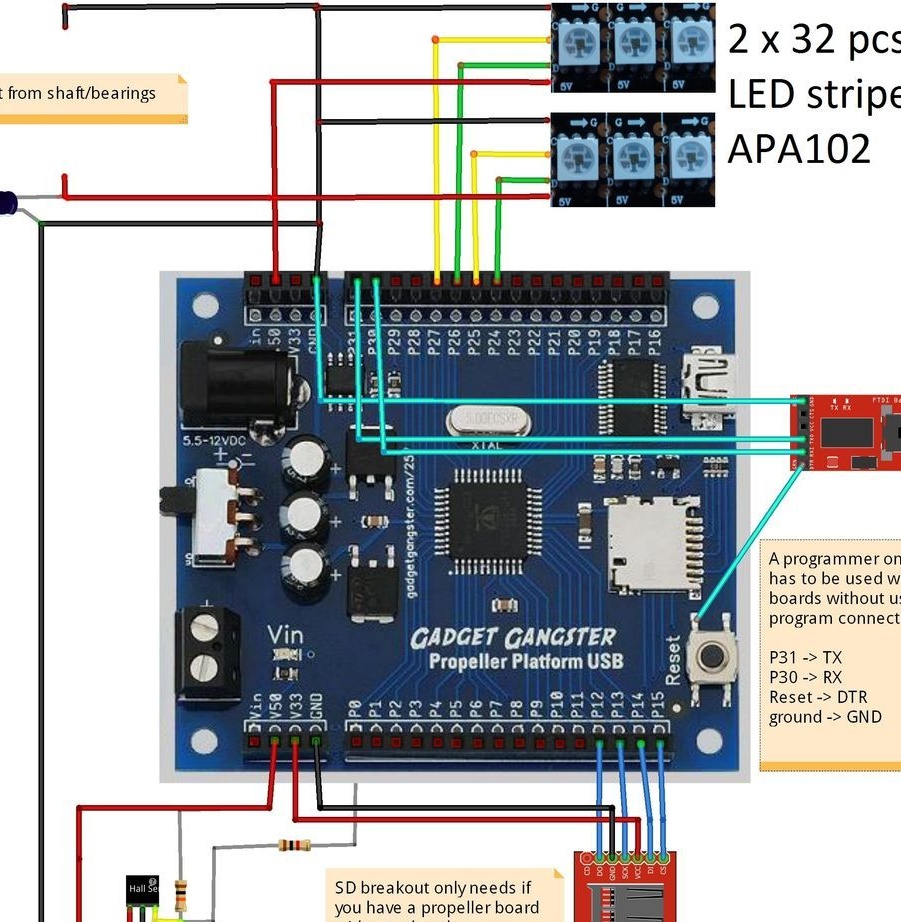
1664 LED 2 prúžky po 32 kusoch
2. Kondenzátor 1 000 uF 10 V
3. Hallov senzor a magnet
4. Vytiahnutý odpor 1k, 10k
5. Prsteň musí byť vytlačený na 3D tlačiarni alebo použiť kus PVC rúrky
6. Plastové pásky (100 mm)
7. Dobré lepidlo, ktoré sa drží spolu a nelieta pri 2500 ot./min
Budete tiež potrebovať mikrokontrolér vrtule Parallax. Alebo môžete použiť iný model kontrolóra, ale navyše si účtujte poplatok. Tento ovládač je naprogramovaný a bliká rovnako jednoducho ako Arduino, Na programovanie oboch radičov budete potrebovať adaptér USB-TTL.
Bývanie.
Bývanie pre domáci Môžete si vziať dosť tvrdo. Najdôležitejšie je, že môžete bezpečne pripevniť motor a ložiská.
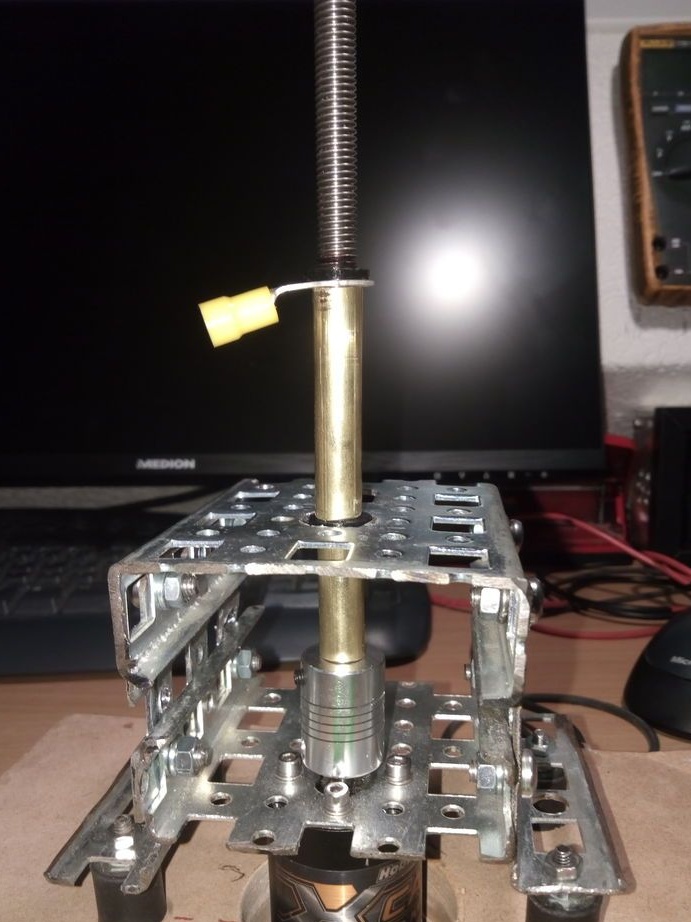
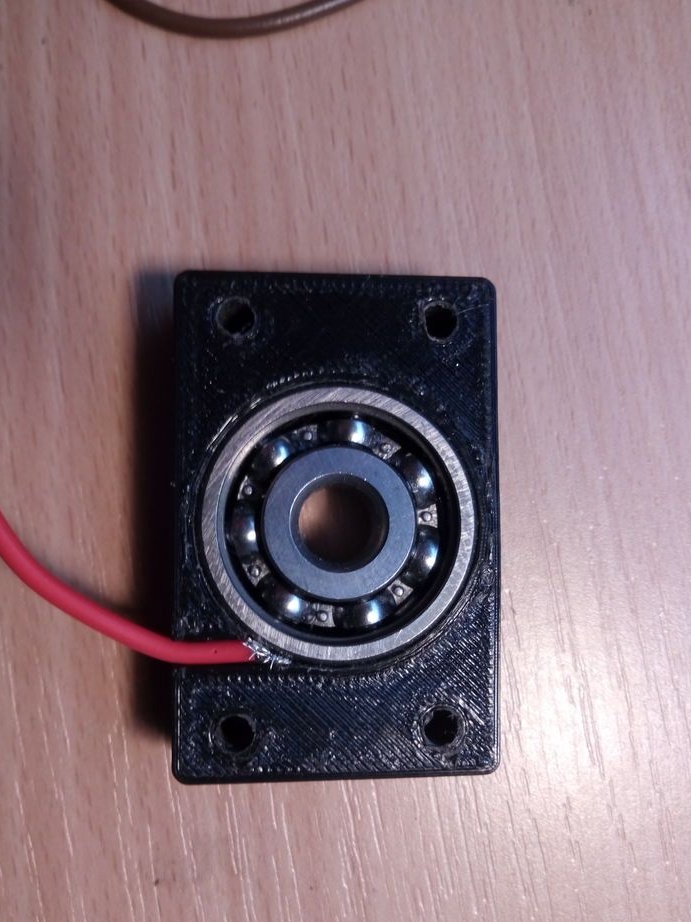
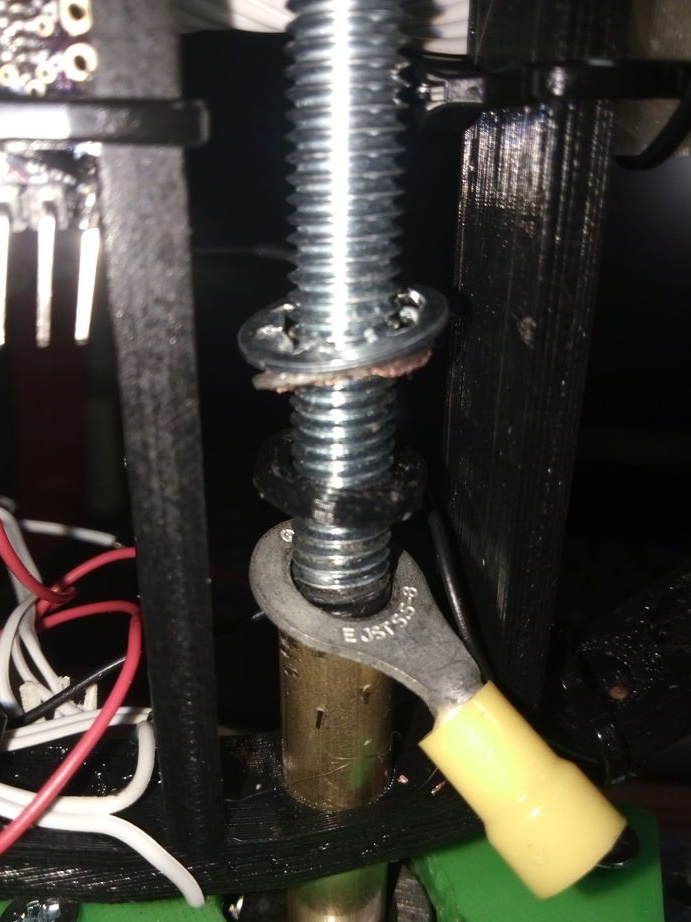
Pre hnací hriadeľ sa používa čap s dĺžkou 250 mm.Dĺžka mosadzných puzdier je 50 a 30 mm. Závisí od veľkosti krúžku a dĺžky hriadeľa. Horný a dlhší rukáv musí byť izolovaný od svorníka, pretože sa používa na napájanie a napájanie LED diód. Aby ste to dosiahli, ovinte elektrickú pásku na vlásenku alebo použite zmršťovanie, budete potrebovať aj dve umývačky plastov. Puzdro bude potrebné vyvŕtať na 8,5 - 9 mm, inak sa nezmestí. Druhý rukáv spolu s tyčou tvoria negatívny kontakt.
Mínus výkon sa umiestni do špeciálnej drážky a pritlačí sa k ložisku v držiaku, ktoré sa dá vytlačiť na tlačiarni. Súbor zátvorky STL v archíve.


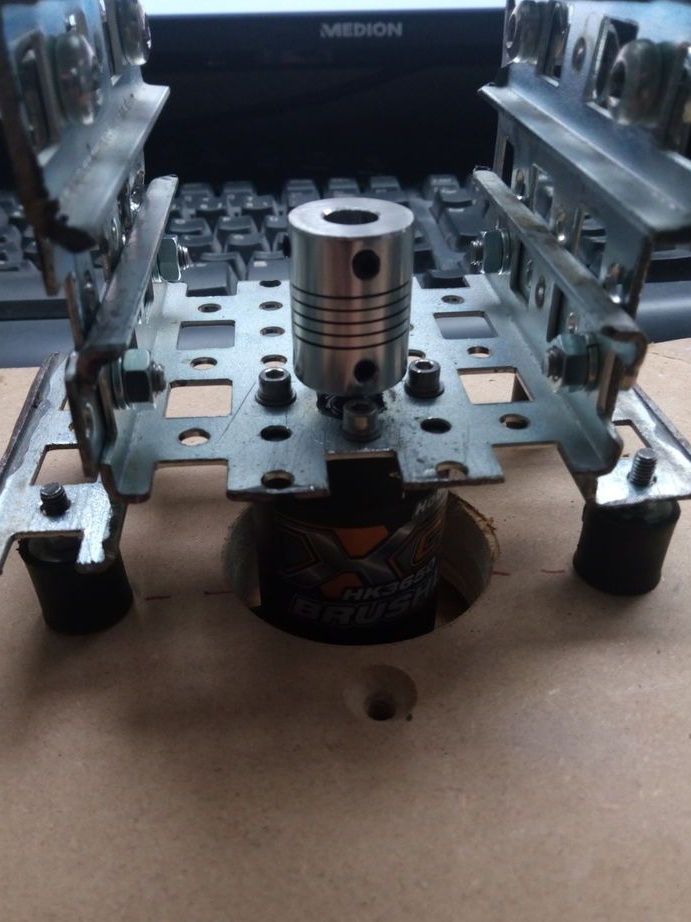
Teraz musíte pripojiť elektrický motor, ako je to znázornené na obrázku.
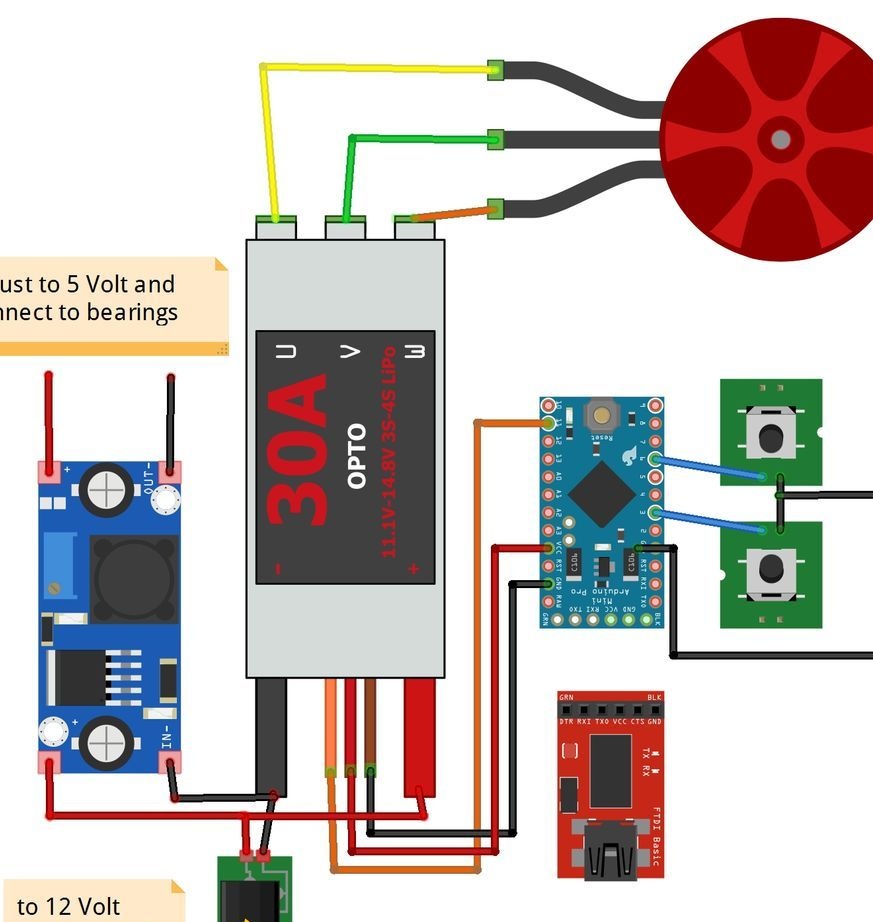
Na nastavenie rýchlosti sa používajú dve tlačidlá na diagrame. Keď zapnete napájanie, ESC dostane hodnotu 500 μs. Stlačením jedného z tlačidiel zapnite motor. Náčrt bude mať hodnotu „StartPos = 625“. Neskôr, keď nastavíte rýchlosť, túto hodnotu môžete zmeniť. Stlačte tlačidlo na dve sekundy a motor by sa mal zastaviť.
Zostavenie základnej konštrukcie.
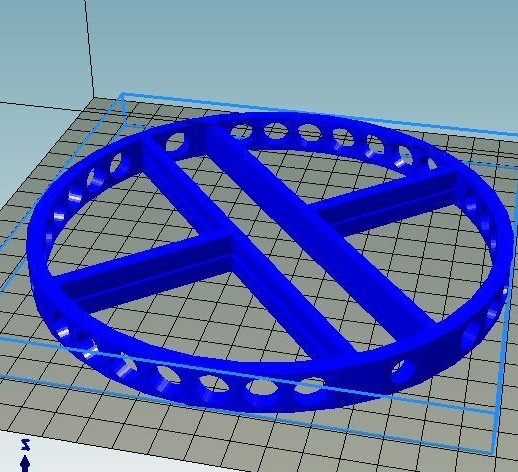

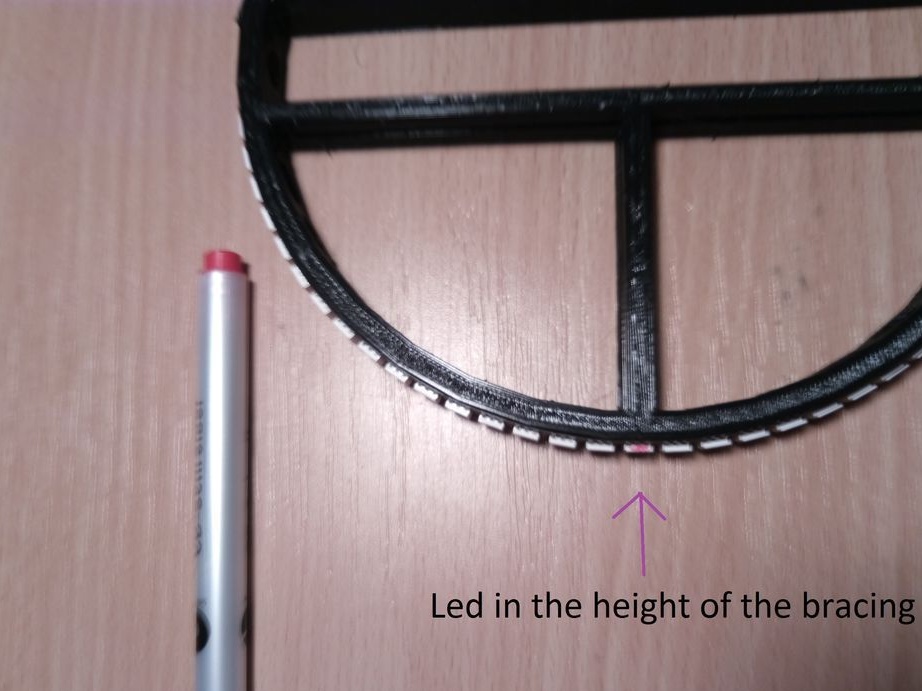
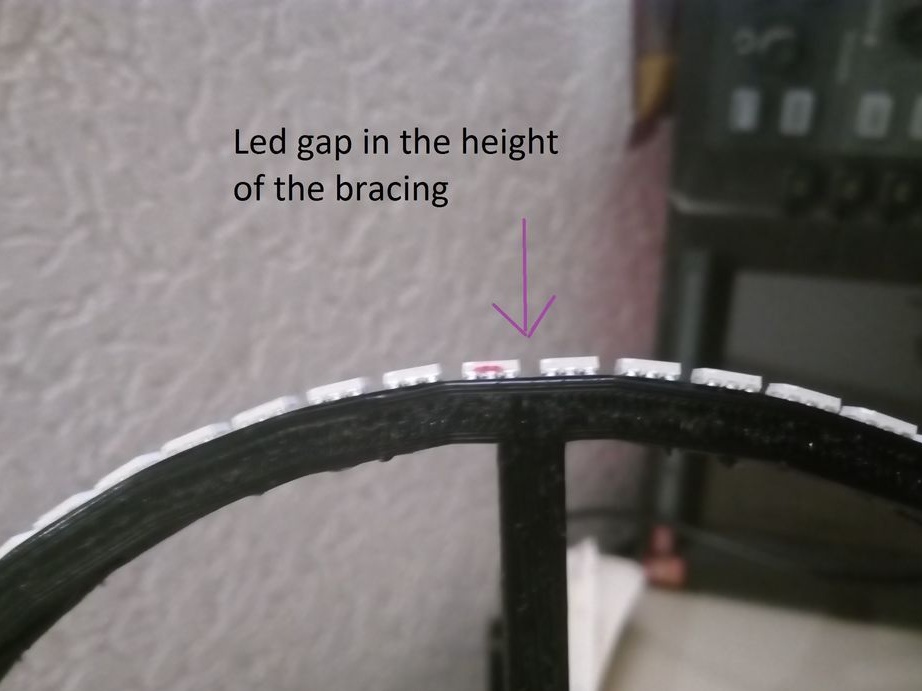


Za týmto účelom vytlačte zvonenie z priloženého súboru. Autor v ňom urobil veľa dier, aby znížil hmotnosť. Môžete použiť kus PVC rúrky. Rezané sú dva prúžky 32 LED. Dva prúžky LED tvoria párne a nepárne riadky. Usporiadajte pásky tak, aby LED jednej pásky boli umiestnené medzi LED druhej druhej, ale zozadu. Po upevnení pásky môžete pripojiť kontrolky LED na doske radiča. A potom musíte vyvážiť celú zostavu.
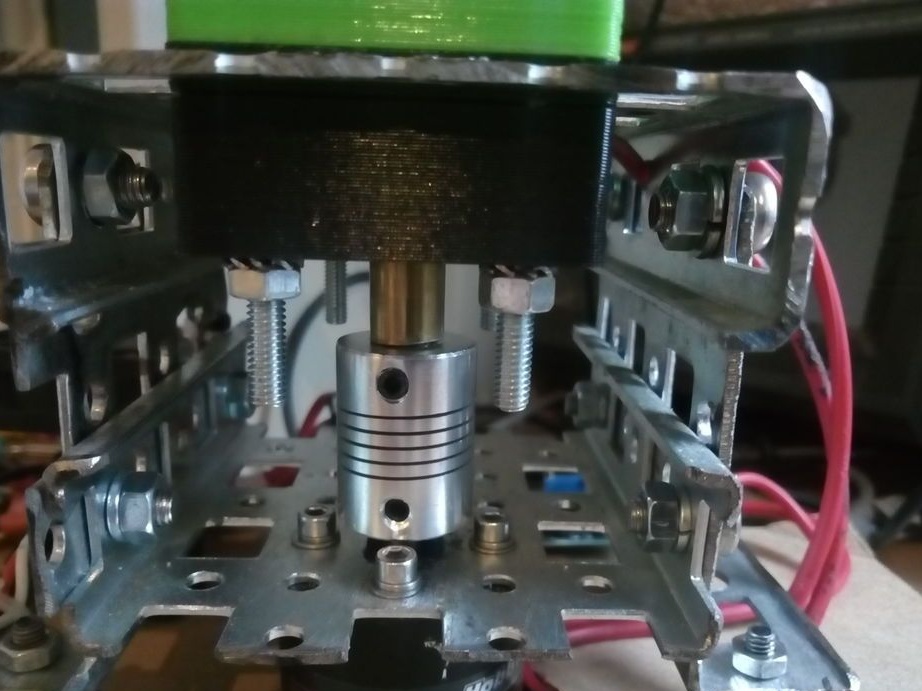
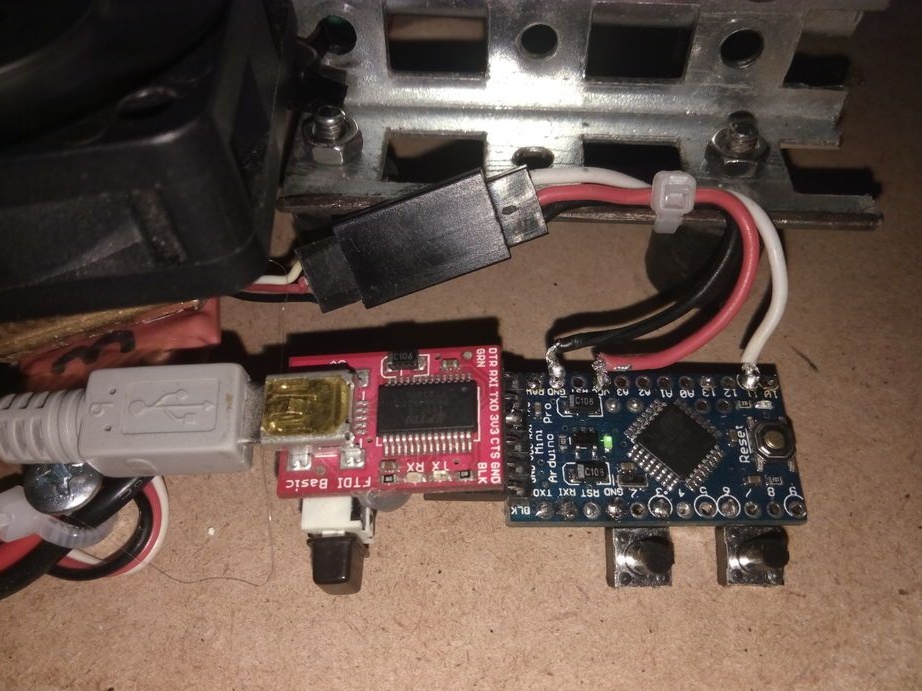
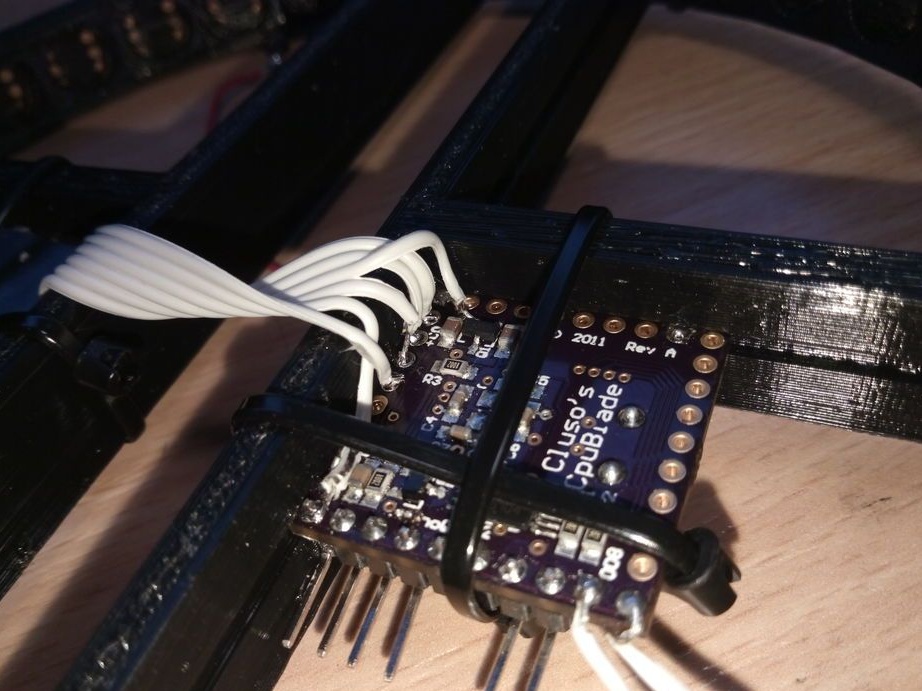
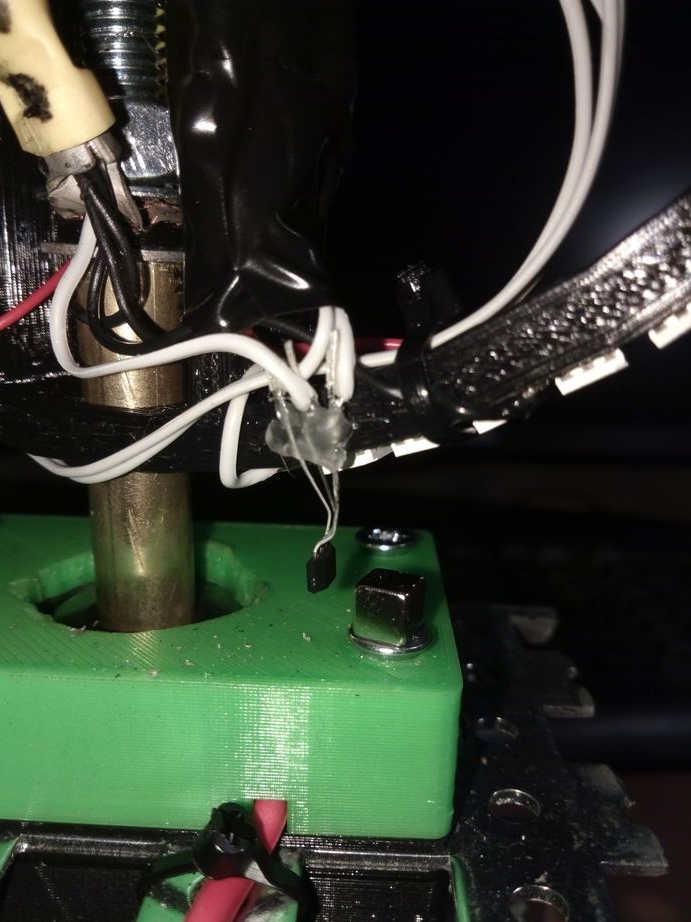
Nasledujúce fotografie ukazujú, ako spojiť všetky komponenty zariadenia dohromady. Na fotografii je tiež zobrazený nainštalovaný Hallov senzor s magnetom.
Na naprogramovanie mikrokontroléra Parallax Propeller potrebujete
NEPRIPÁJAJTE svoje zariadenie k USB alebo sériovému portu, kým nemáte nainštalovaný softvér. Viac podrobností o nahrávaní firmvéru do Parallaxu nájdete
Autor používa staršiu, a teda menej ekonomickú, z hľadiska spotreby energie, dosku MCU, pretože na nových doskách radiča nenájde nové knižnice.
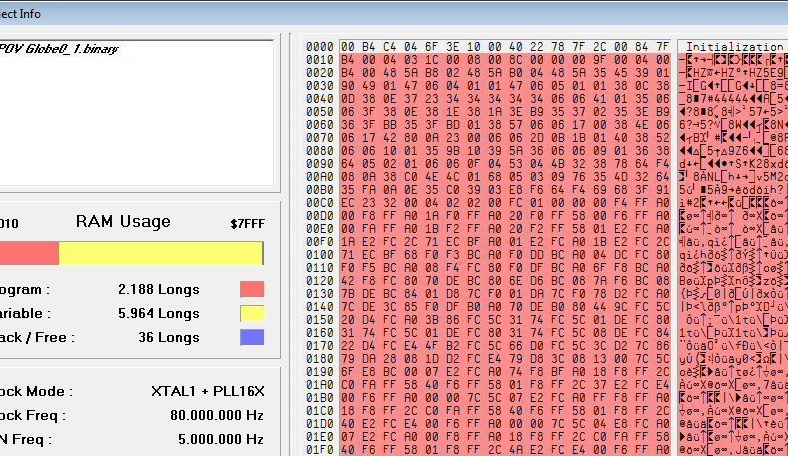
Po zhromaždení a pripojení všetkého musíte naprogramovať ovládač. Autor to robí s pomocou. Súbory s firmvérom v archíve.
Teraz môžete skúsiť zariadenie spustiť. Od začiatku skopírujte testovací obrázok na SD kartu a vložte ho do slotu.
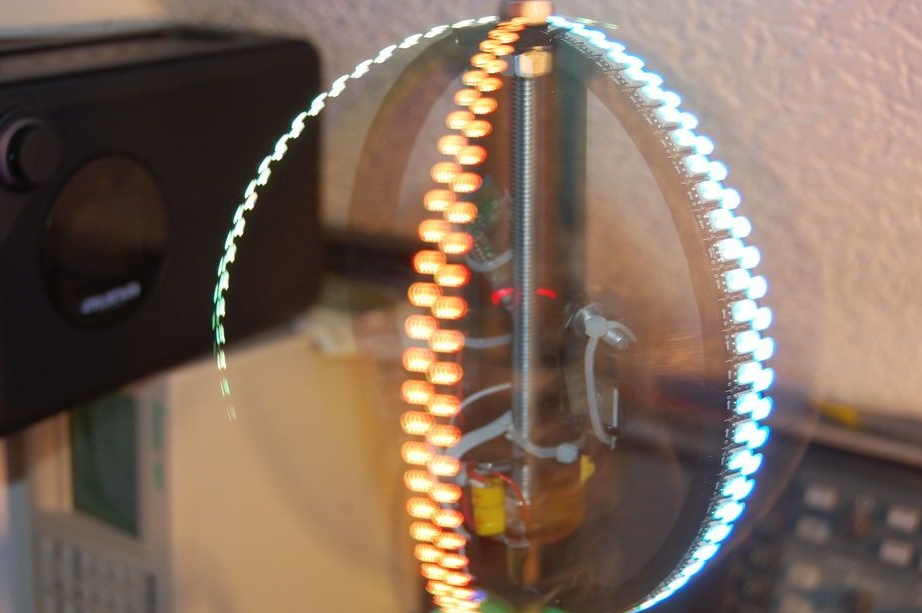
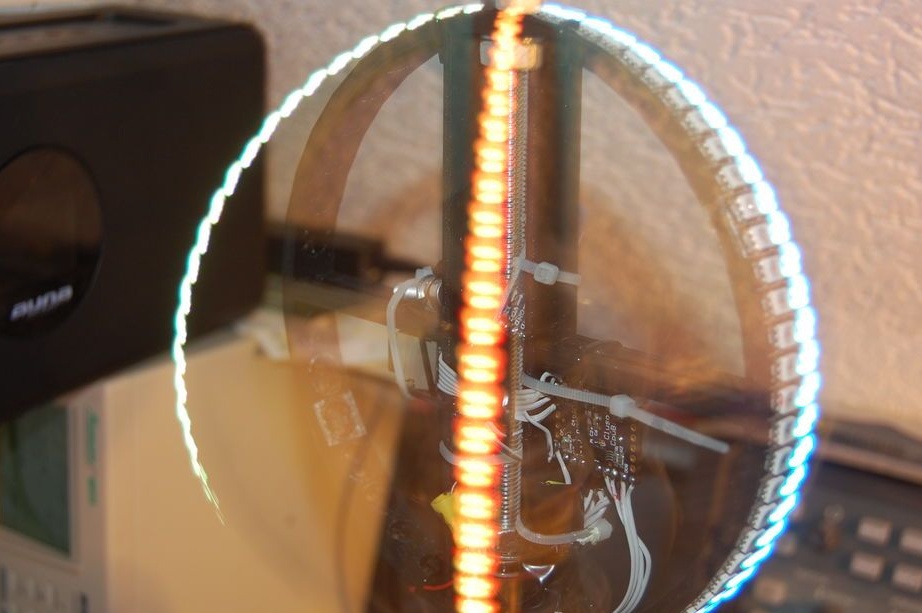
• Ak prstenec otáčate rukou, kontrolky LED by mali blikať vždy, keď Hallov senzor prejde magnetom
• Zapnite motor. Pri zvyšovaní rýchlosti pomocou tlačidiel je potrebné zabezpečiť, aby sa LED diódy rozsvietili, ako je znázornené na 2 fotografiách
• Pripojte terminál Arduino k riadeniu motora.
• Zapamätajte si zobrazenú hodnotu.
• Zastavte motor
• Napíšte predtým uloženú hodnotu do premennej "startPos"náčrtok POV_MotorControl
• Znovu naprogramujte Arduino.
Pri nasledujúcom naštartovaní motora ihneď pri správnej rýchlosti. Teraz môžete na mape „Vyplniť“ akýkoľvek obrázok. Ak to chcete urobiť, musíte zmeniť veľkosť obrázka o 120x64 pixelov, otočiť obrázok proti smeru hodinových ručičiek o 90 stupňov a zvisle zrkadliť. Znížte jas obrazu, pretože LED diódy sú veľmi jasné. Na tento účel je lepšie použiť gama korekciu s koeficientom 0,45.
Uložiť obrázok ako BPM 24 bitov bez kompresie, Po všetkých manipuláciách bude mať výstupný súbor veľkosť 23094 bajtov.



