

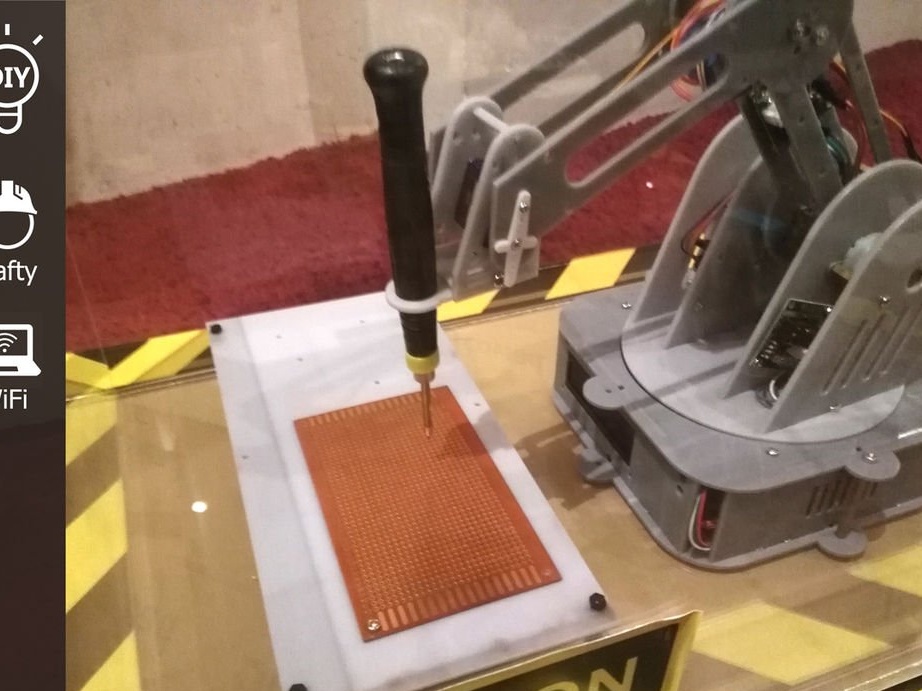

Bohužiaľ, tento materiál nebude ťahať za plnohodnotný článok, a preto som sa rozhodol umiestniť ho do „tipov“, možno ho môže niekto potrebovať. Článok hovorí, ako sa spájkovať elektronický komponenty na doske plošných spojov pomocou automatizovaného manipulačného ramena.
Myšlienka tohto projektu nastala pánovi náhodou, keď študoval rôzne schopnosti robotických manipulátorov, a potom zistil, že existuje niekoľko, ktoré pokrývajú oblasť automatizovaného zvárania a spájkovania robotickým manipulátorom.
Náradie a materiály:
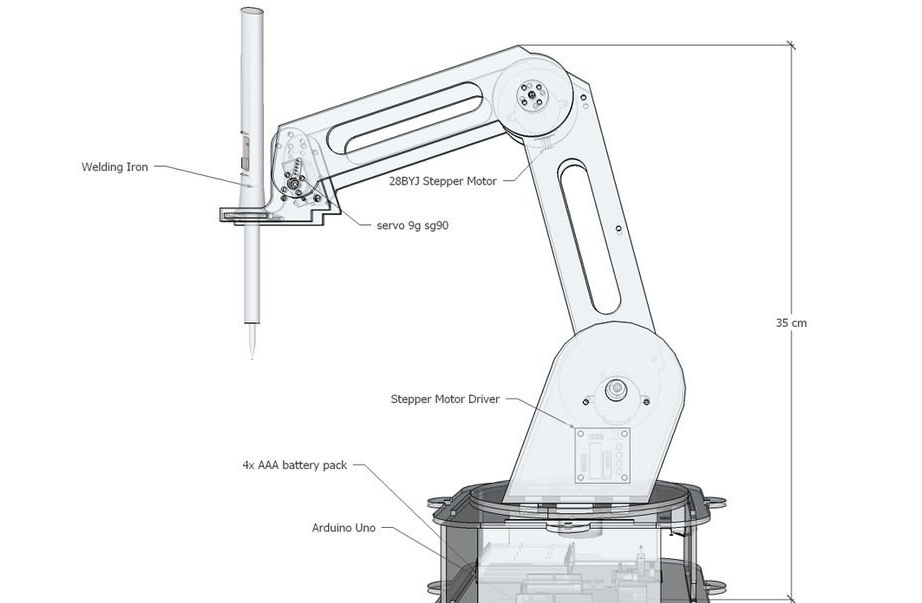
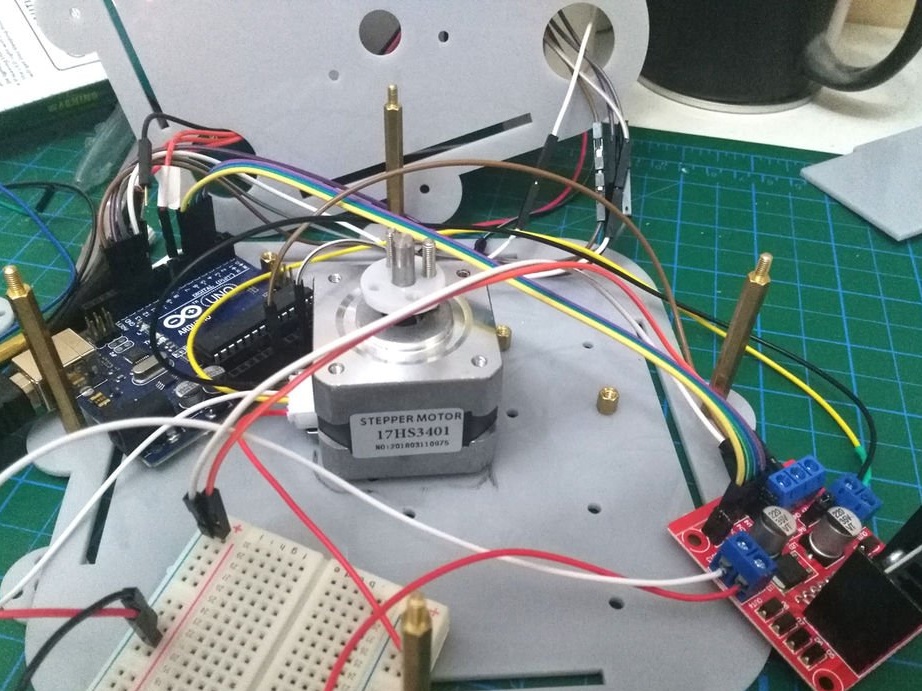
-Step motor 28BYJ-48 s modulom vodiča ULN2003;
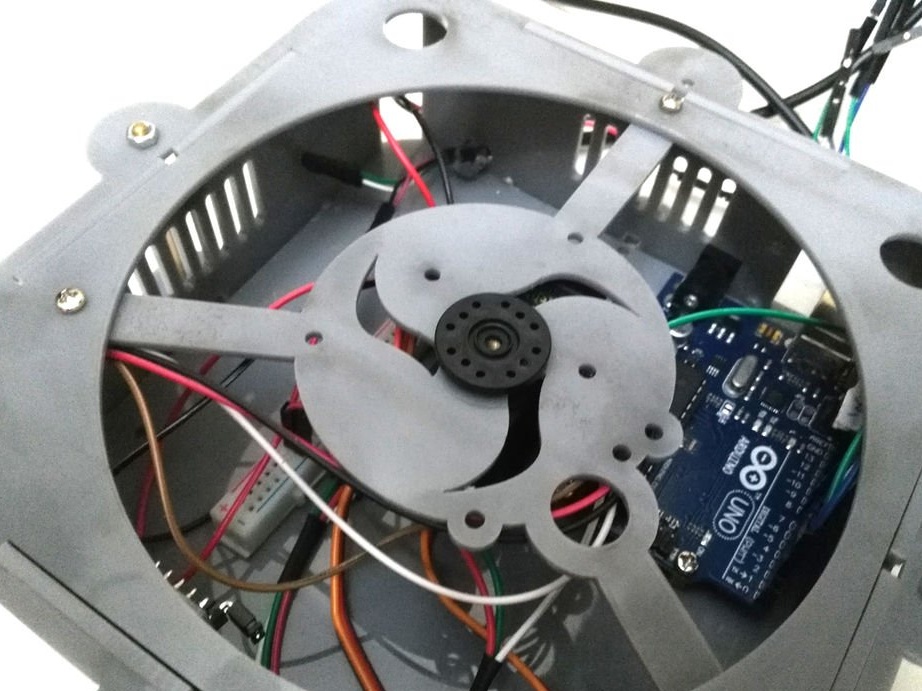
- Arduino Uno R3;
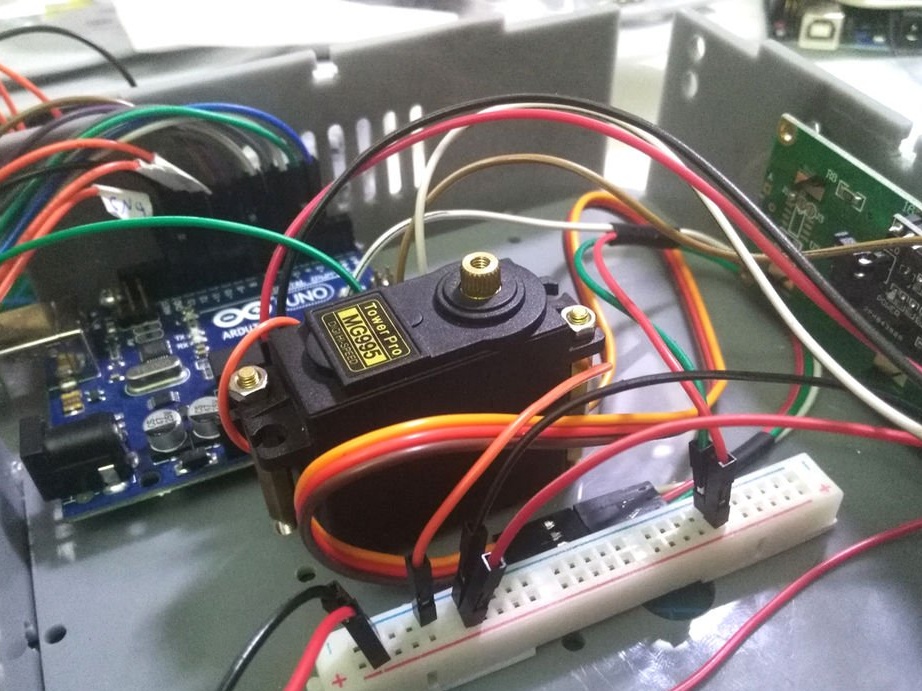
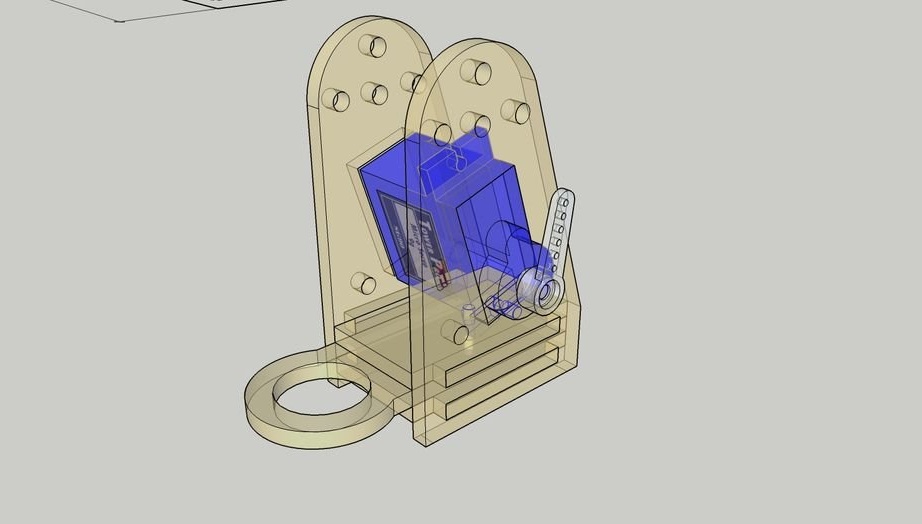
Servomotor MG-90S;
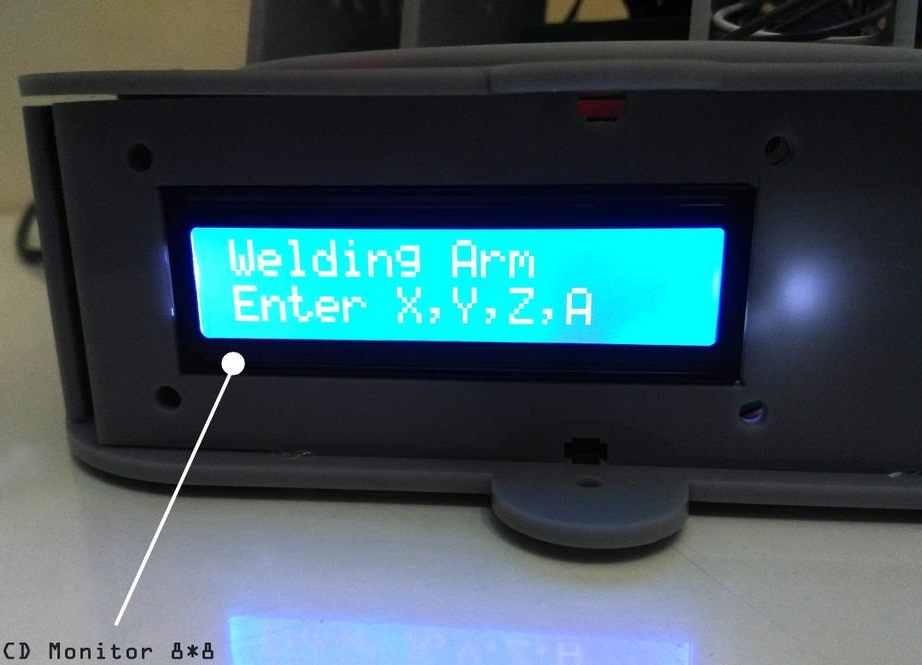
- LCD 1602;
-Maketnaya doska;
- spojovacie vodiče;
- spúšťací konvertor;
-Servox SC-1252MG $ servopohon
-Krepezh;










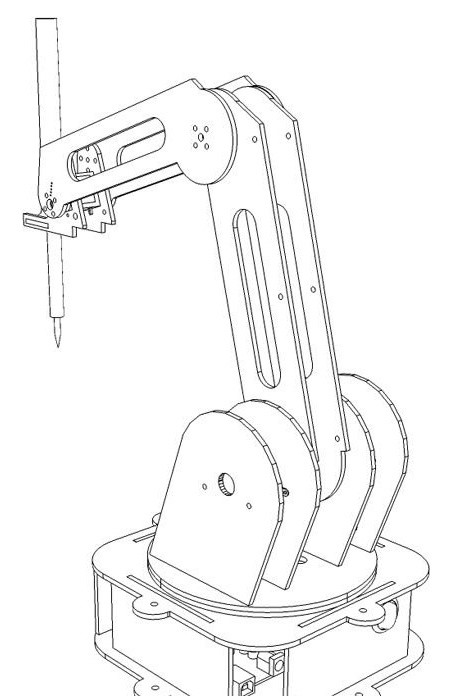
Sprievodca prvý projekt rozvinul. Časť detailov bola vyrezaná na CNC stroji s laserom.
Po zostavení všetkých častí bolo odhalených niekoľko problémov:
1. Páčky boli príliš ťažké na to, aby ich mohli ovládať malé krokové motory.
2. Od tej doby model bol vyrobený z plastu, trenie rotujúcej základne bolo vysoké a pohyby neboli plynulé.
Prvým riešením bolo kúpiť väčší krokový motor schopný vydržať váhu a trenie, a master pripravil základňu pre inštaláciu väčšieho krokového motora.
Problém však nezmizol a potom majster úplne zmenil základnú konštrukciu a nainštaloval servomotor s prevodovkou a kovovými prevodmi.
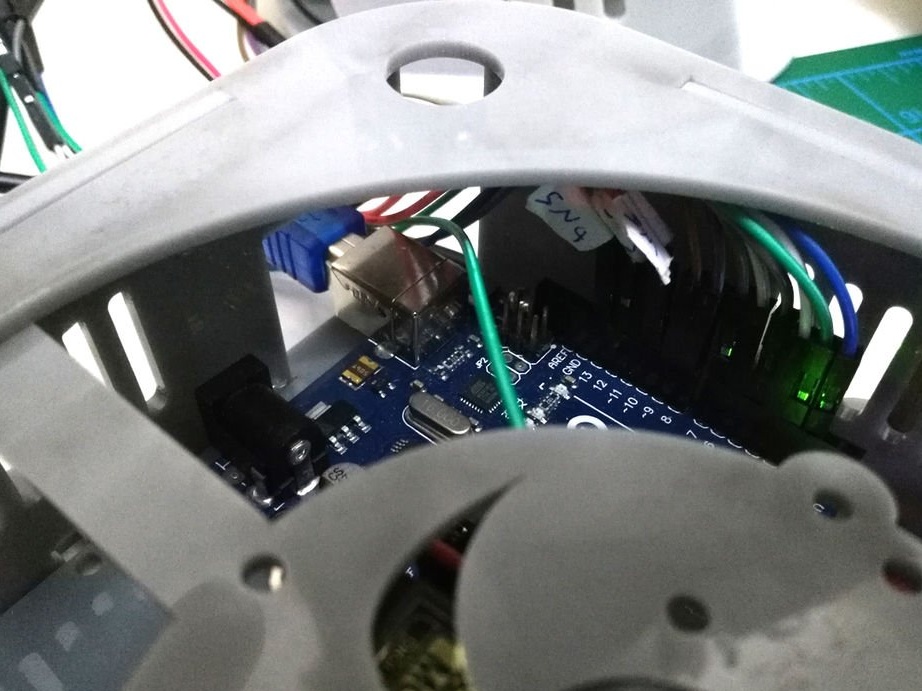
3. Napätie.
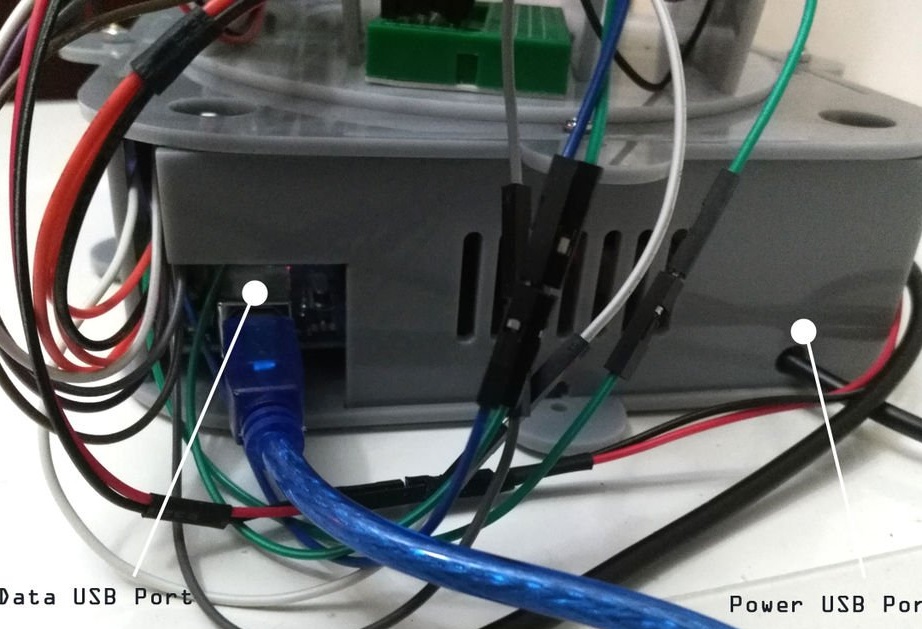
Arduino môže prijímať energiu buď z napájacieho konektora jednosmerného prúdu (7-12 V), USB konektora (5 V) alebo z kolíka VIN dosky (7-12 V). Napätie cez 5 V alebo 3,3 V kontakty obchádza regulátor a majster sa rozhodol kúpiť špeciálny USB kábel, ktorý podporuje 5 V z PC alebo iného zdroja energie.

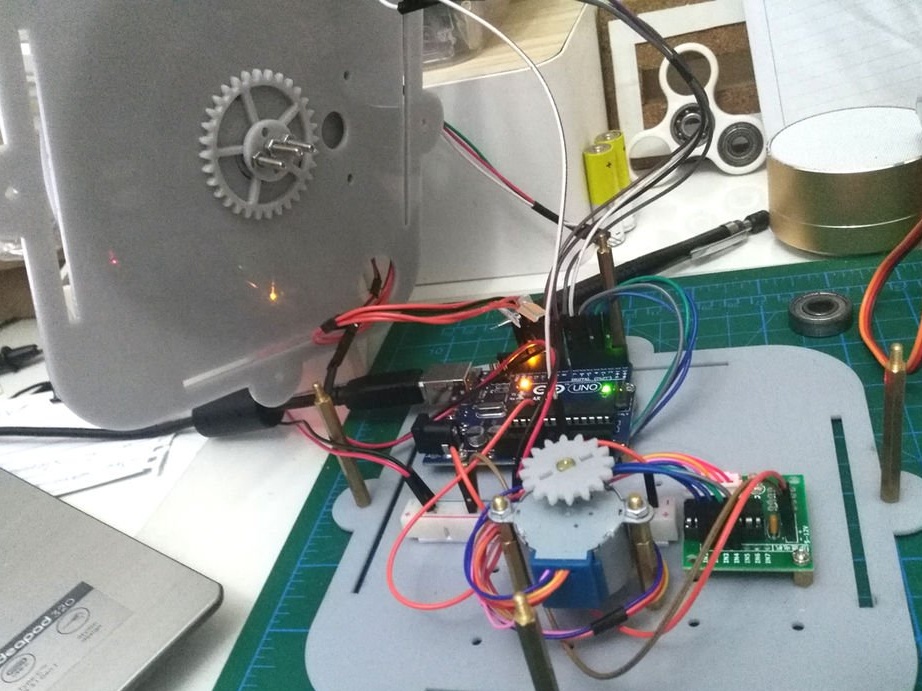
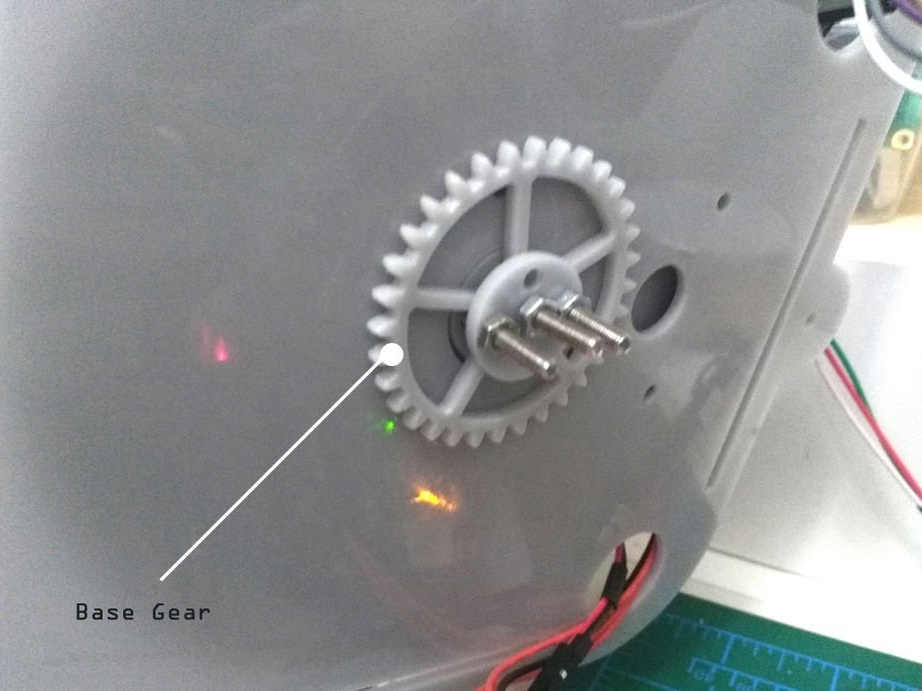

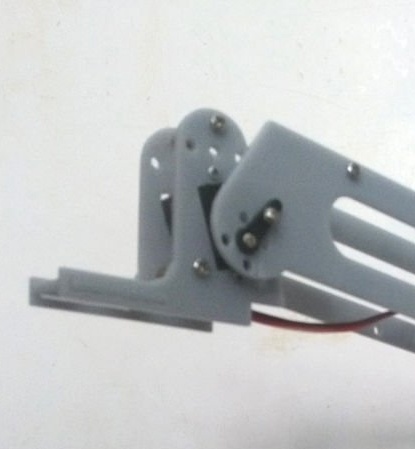
Po niekoľkých úpravách majster zmenil dizajn modelu, zmenšil veľkosť konzol a urobil vhodný otvor pre prevodovku servomotora, ako je znázornené na fotografii.

Aby držal spájku, majster urobil špeciálny držiak.Pre správnu prevádzku je potrebný servomotor s parametrom rotácie o 180 stupňov.

Kód si môžete stiahnuť nižšie.

ProjectCodeFirst.ino
Hlavné prvky výroby zariadenia sú uvedené vo videu.
Informácie samozrejme nestačia, neexistuje žiadny obvod, neexistujú žiadne súbory pre CNC, neexistujú príklady zariadení, ale existuje dobrý nápad a možno aj čarodejník so záujmom, na základe tejto myšlienky vytvorí plne funkčné zariadenie.