
Dobrý deň všetkým, milí priatelia! V dnešnom článku by som vám chcel ukázať dosť zaujímavý nápad domáci, čo môže urobiť takmer každý, kto to urobil remeslá a kto vie niečo o Arduino.
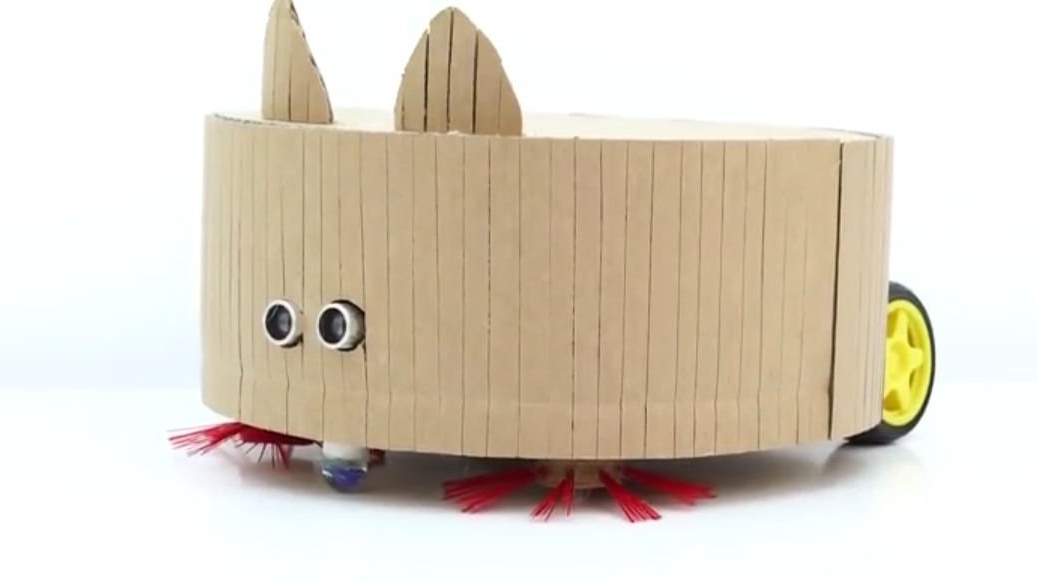
Všeobecne platí, že dnes budeme robiť jednoduché roboty kartónový vysávač Urob to sám, Ale povedzte mi, pretože som vám už povedal, ako si sami robíte čistiaceho robota, a budete mať pravdu, ale tento vysávač je oveľa jednoduchší, lacnejší a pohodlnejší ako ten predchádzajúci. Áno, a to model upravený a vyzerá lepšie a má tiež plnú automatizáciu na palube. toto nepárna práce, nielenže pomôžu plynúť čas, ale stanú sa tiež nepostrádateľným pomocníkom vo vašej domácnosti alebo dielni. Stručne povedané, vec je užitočná a nie komplikovaná.
Nuž, dosť dlhého predslovu, poďme!
A tak pre tento domáci produkt potrebujeme:
vlnitá lepenka (veľa lepenky)
-
spojovacie vodiče
-
-
-Kolesá pre prevodové motory
- vodič ovládačov pre Arduino (autor domáceho produktu používa ovládač modelu, ktorý stačí pripojiť do arduina, aby ste sa mohli pripojiť, ale môžete použiť vodiča, ktorý je pre vás vhodný, hlavná vec je, že napätie sa zhoduje s prevodovými motormi)
-
-plastové uzávery fliaš
- štetiny z metly
-motor s ventilátorom turbíny, v zásade to môžete urobiť sami
plastové pletivo
- malý kontajner
krabička na dve 18650 batérií
-
Z nástrojov budeme tiež potrebovať:
spájkovačka
lepiaca pištoľ
kancelársky nôž
-lineyka
- ceruzky alebo značky
Prvým krokom je odobrať veľkú lepenku, pravítko a kompas. Meriame 13 cm kompasom a na kartón nakreslíme kruh, po ktorom ho vyrežeme, celkovo potrebujeme dva takéto kruhy:


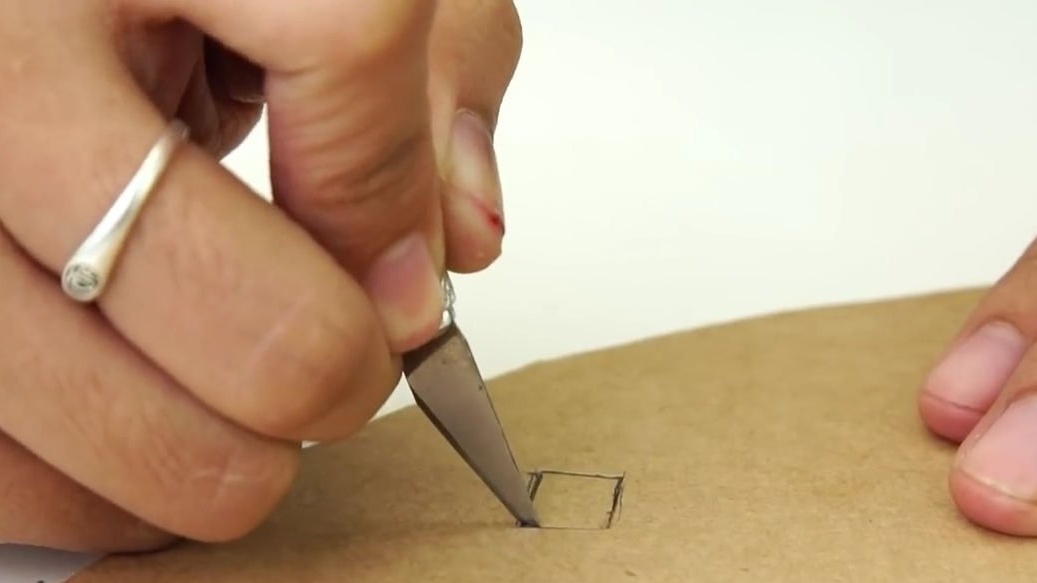
Potom sme vystrihli z tej istej lepenky obdĺžnik malej veľkosti. Berieme pravítko a ceruzku, ceruzkou kreslíme kartón v intervale asi 1 cm, po ktorom vyberieme kancelársky nôž a urobíme malé rezy hornej vrstvy kartónu bez toho, aby sme sa dotýkali dna. Je to potrebné, aby sa lepenka stala pružnejšou:



Raný obrobok sa krúti okolo jedného z lepenkových kruhov a samozrejme ho lepíme horúcim lepidlom:

Poďme sa zaoberať elektronikou a mechanickou časťou.
Ak chcete začať, zoberte prevodový motor a nasaďte naň koleso, to isté robíme s druhým motorom:

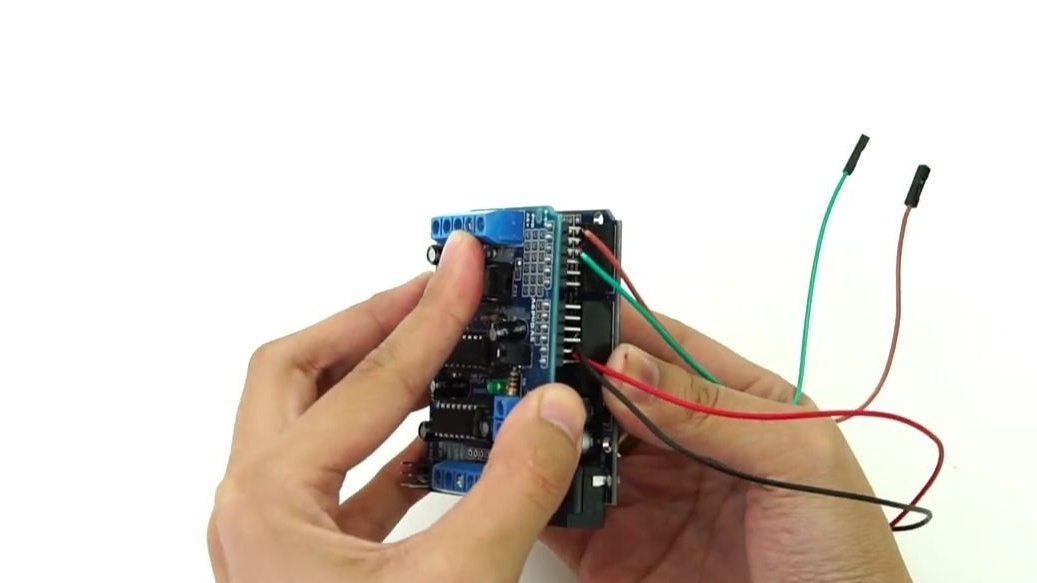
Potom vezmeme dosku Arduino Uno a spojovacie vodiče, ktoré musia byť následne spojené s určitými kolíkmi (kontaktmi) na doske. Pre väčšie pohodlie používame rôzne farby: červenú na 5 V, čiernu na GND a ďalšie dva až dva rôzne kolíky. K akým kolíkom pripojíte vodiče, musíte okamžite zistiť na základe kódu alebo napísať kolíky, ku ktorým sú pripojené vaše vodiče. Všeobecne platí, že tu nie je nič komplikované, spájame:

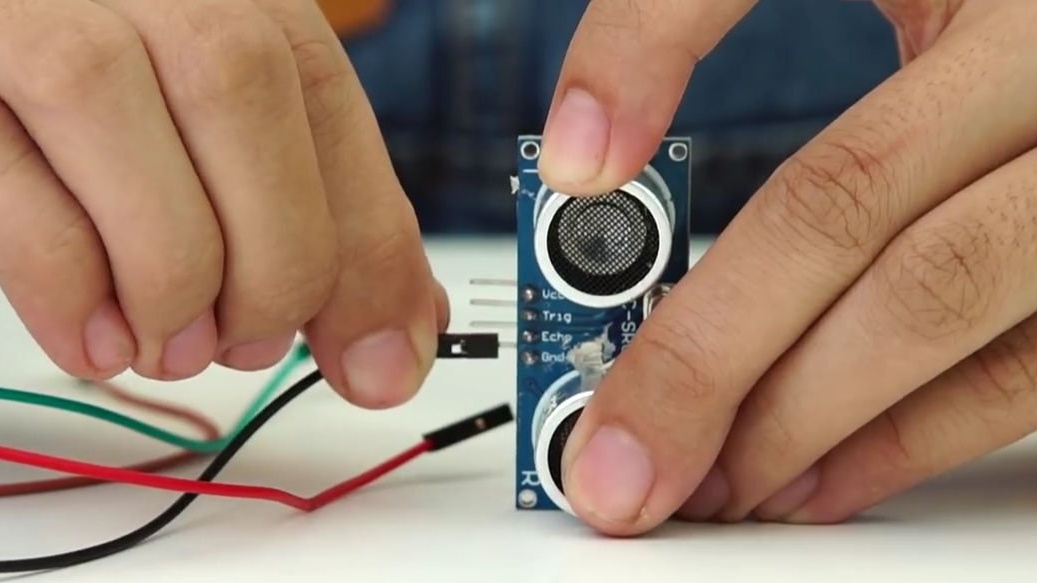
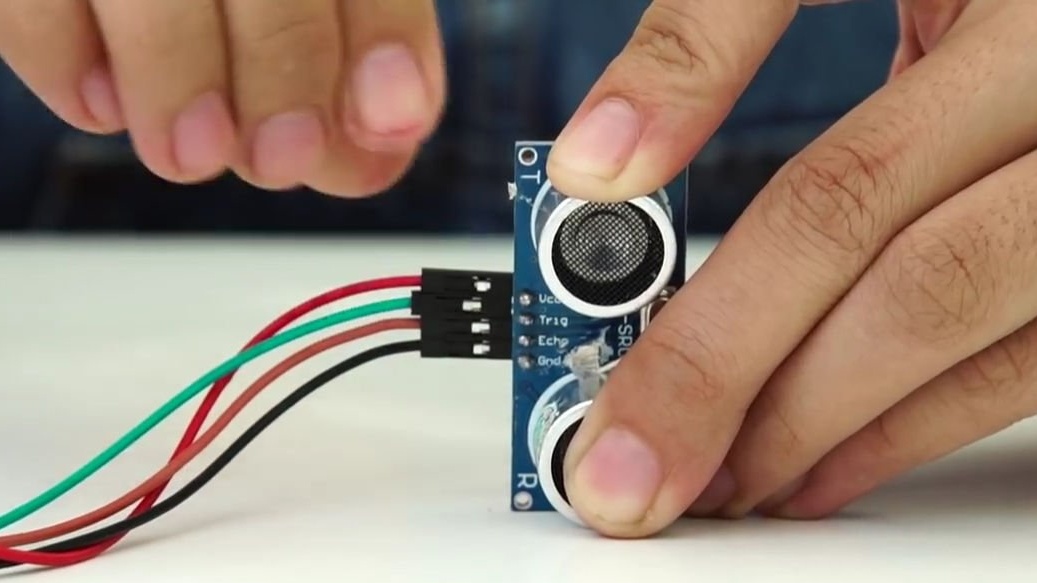
Pripojíme opačnú stranu drôtov k ultrazvukovému zameriavači, ako je to znázornené na fotografii nižšie, ak to nie je jasné, potom si môžete pozrieť video autora.
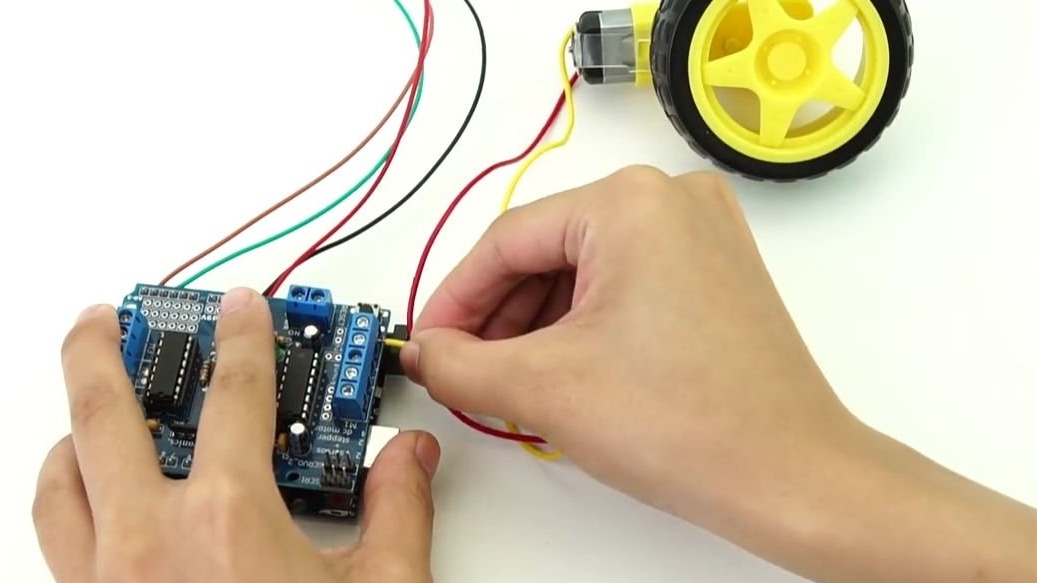
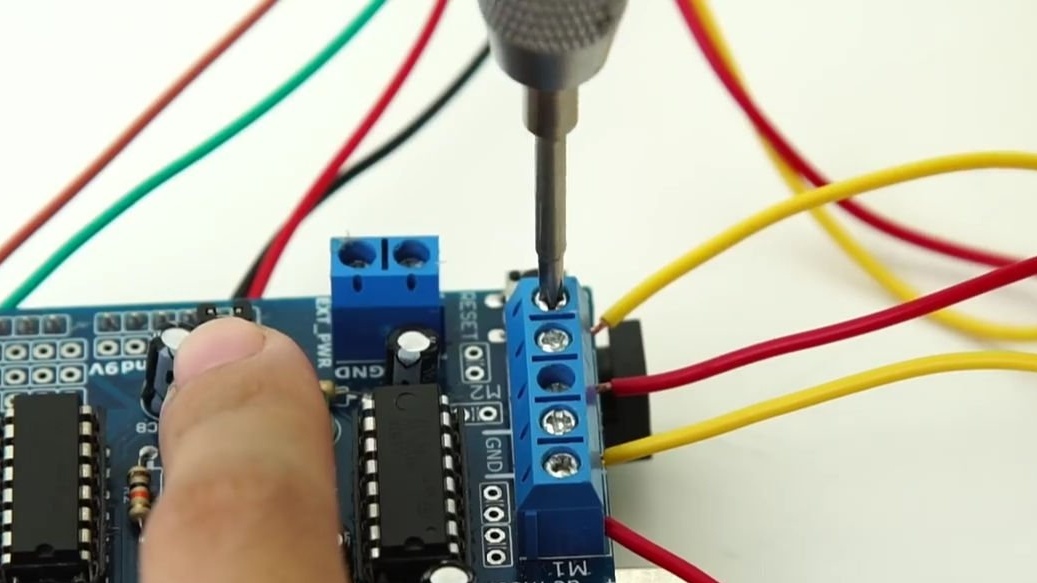
Prevodové motory pripájame k vodičovi motora, nepotrebujete nič spájkovať, stačí ich vložiť do svoriek a to je všetko:

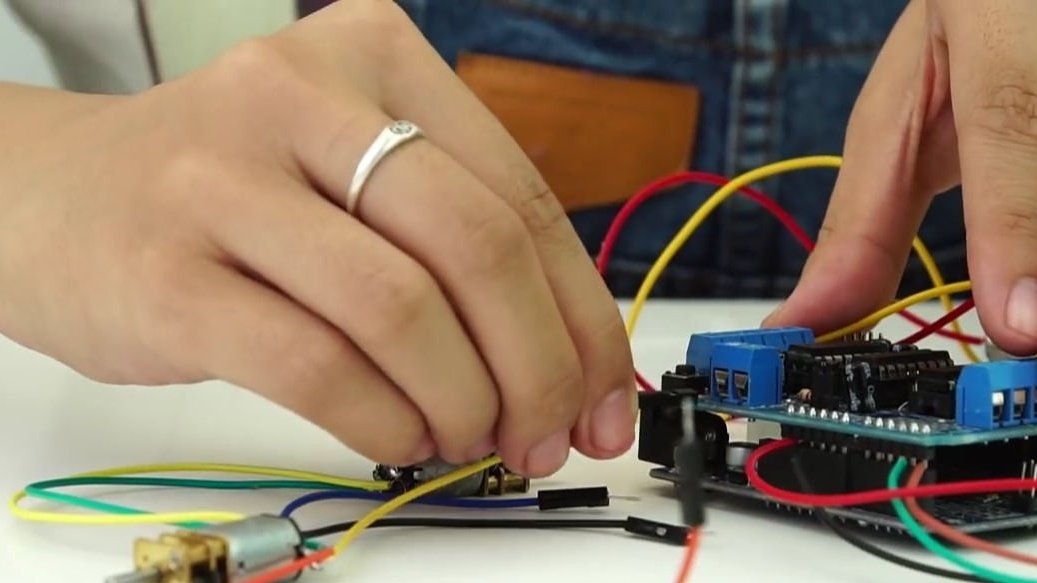
Pripojovacie vodiče je potrebné spájkovať s mini motormi, pomocou ktorých spojíme tie isté motory s vodičom motora. Spravidla pripájame:
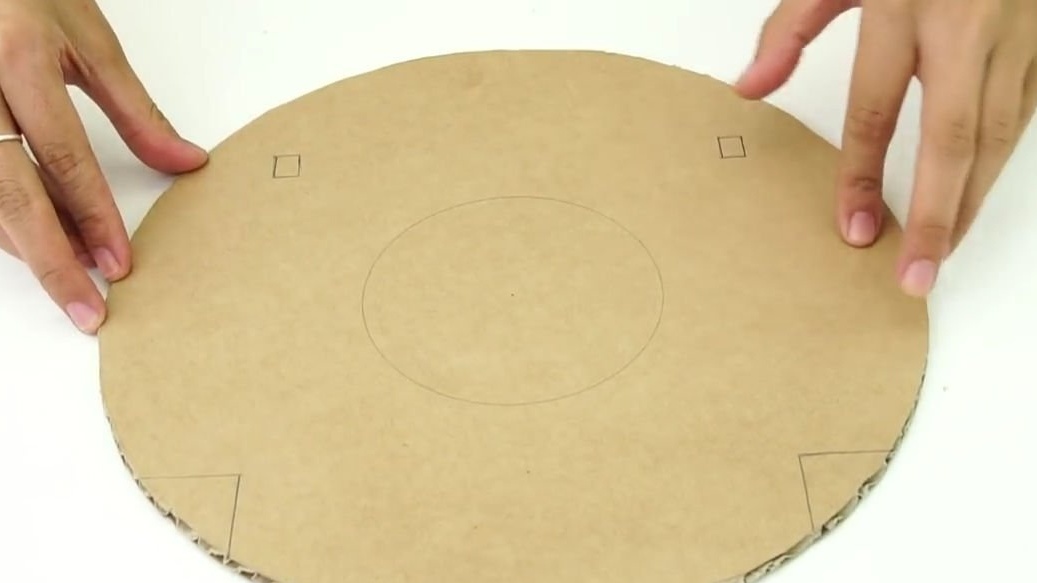
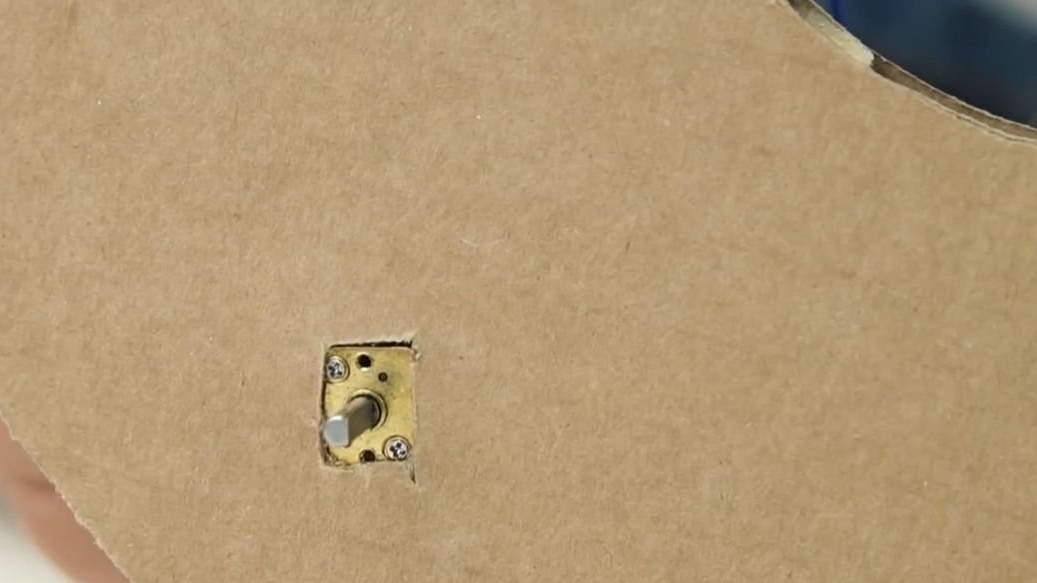
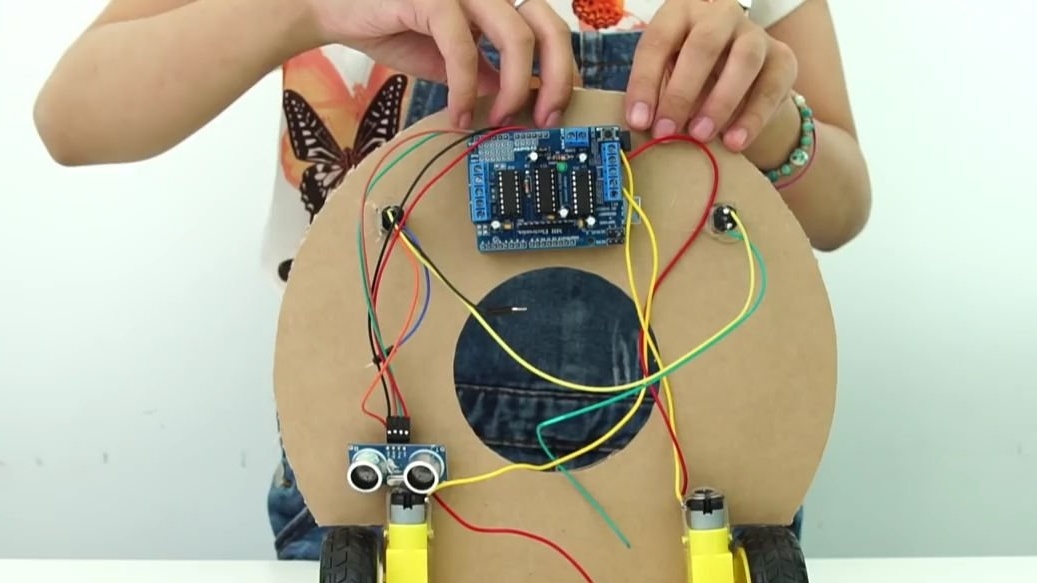
Teraz vezmeme zvyšný kartónový kruh, ktorý bol vyrobený na samom začiatku. Na to musíte nakresliť ďalší kruh v strede a niekoľko obdĺžnikov. Všetky značky si môžete pozrieť na fotografii nižšie. Potom sme vystrihli označené otvory, mali by sa ukázať rovnako ako na fotografii nižšie:

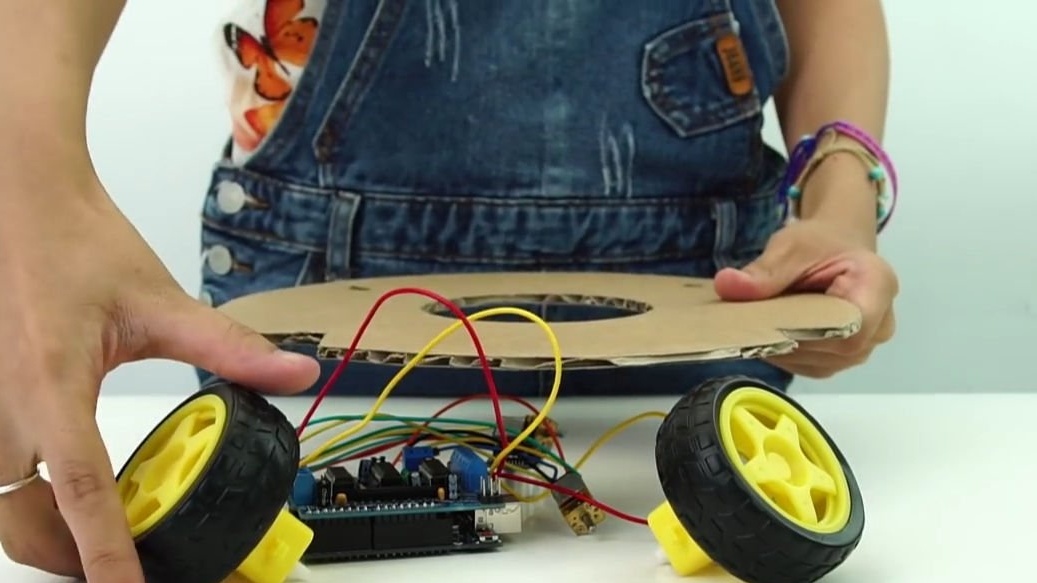
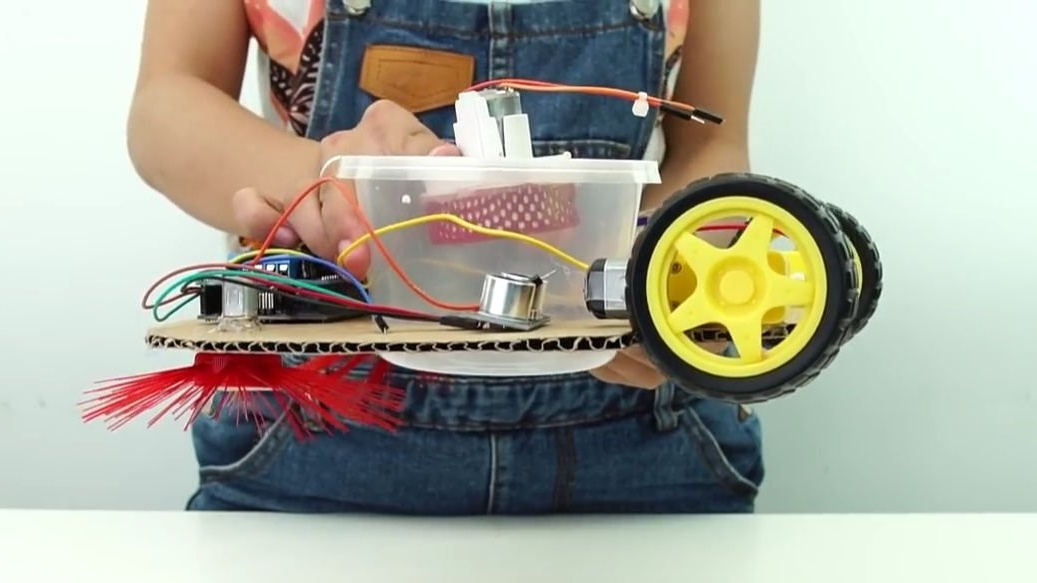
Vezmite celok elektronika a položte ju na predtým vyrobený kartónový kruh. Malé malé motory vkladáme do štrbinových obdĺžnikových otvorov a zvyšnú časť elektroniky pripevňujeme k tavnému lepidlu, veľké prevodové motory pripevňujte paralelne so zadnou časťou a nedotýkajte sa ultrazvukového diaľkomeru:

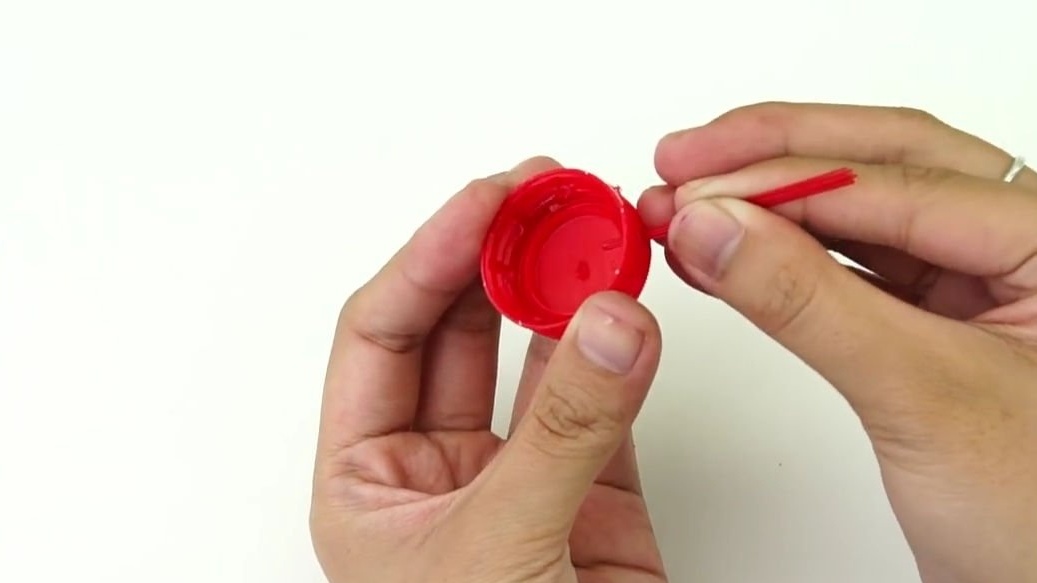
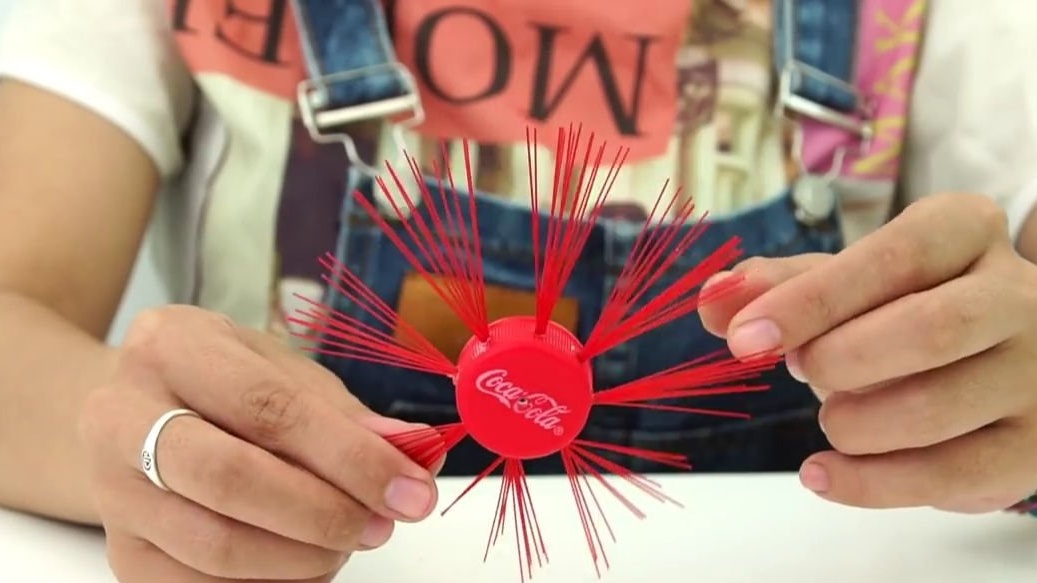
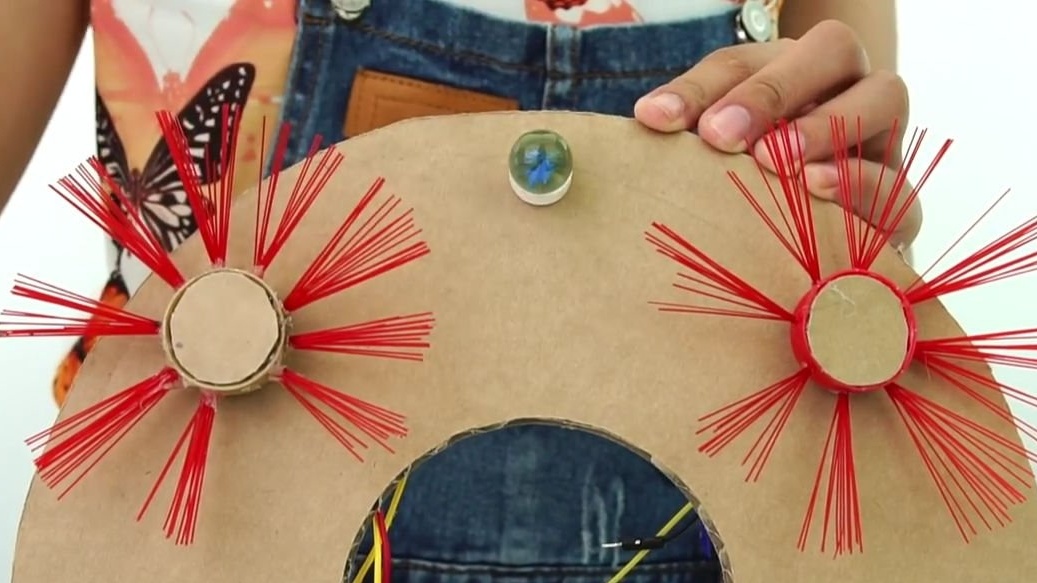
Z plastových fliaš odstránime uzávery, potrebujeme iba dva kusy. Pomocou spájkovačky, horúceho klinca alebo šnúry urobíme diery: jeden v strede veka a druhý na stranách so zárezom asi 1 cm. V otvoroch vyrobených po stranách vystrčíme predtým pripravené štetiny z metly, mali by mať rovnakú veľkosť. Tieto štetiny fixujeme horúcim lepidlom. Celkovo sa musia vyrobiť dva takéto polotovary.
Lepíme na os malých motorov, ktoré sú umiestnené na kartónovom kruhu. Lepíme opäť horúcim lepidlom:


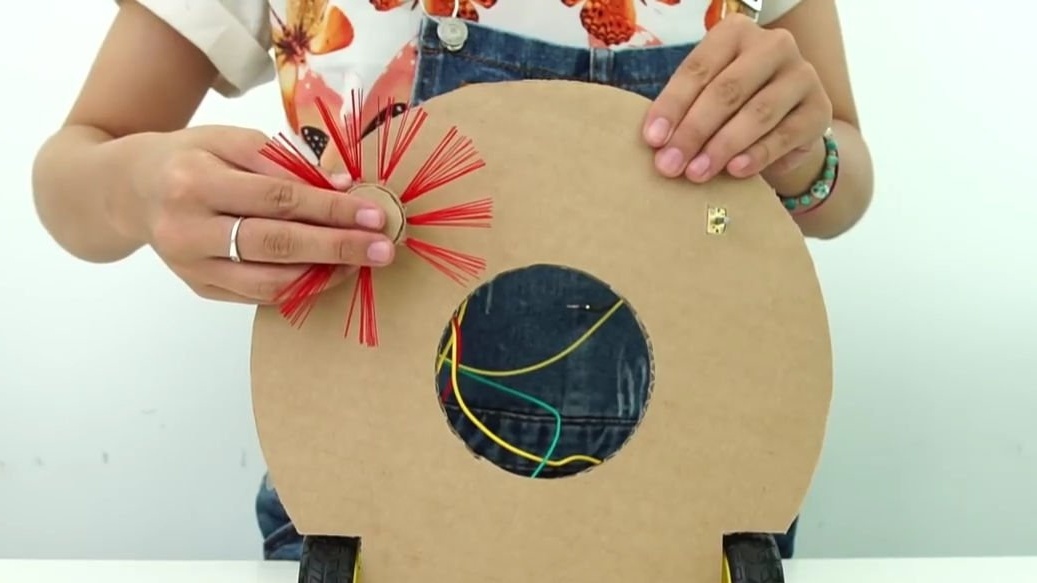

Na prednej strane medzi dve kefy nalepte malú guľu alebo malé koleso, ktoré sa môže otáčať okolo svojej osi:
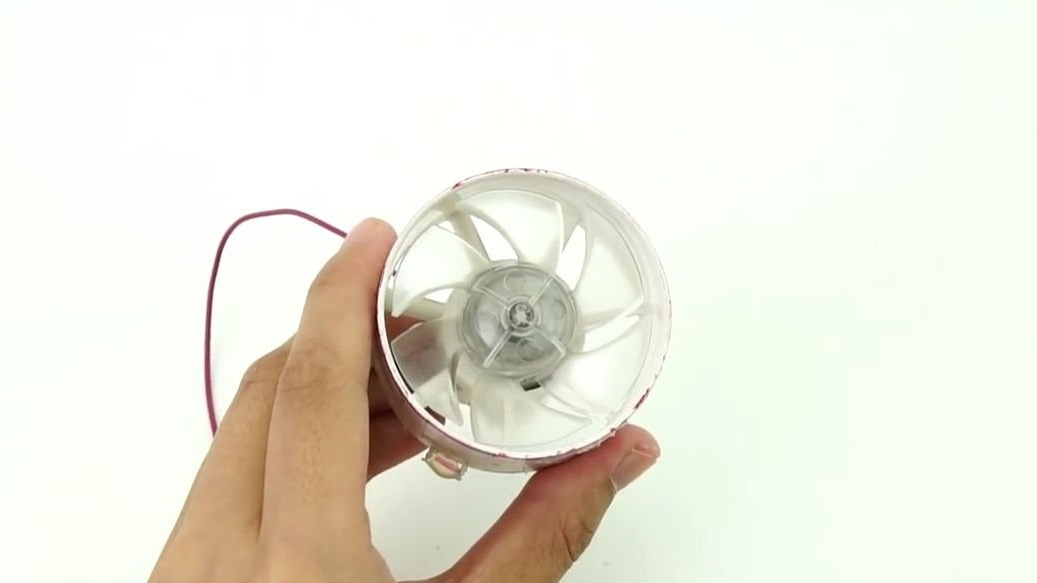
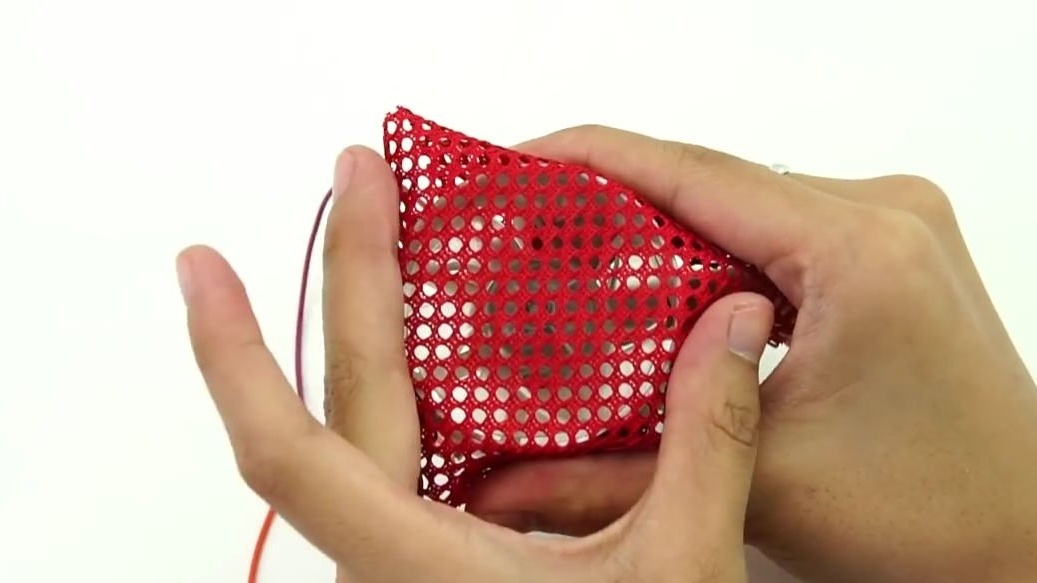
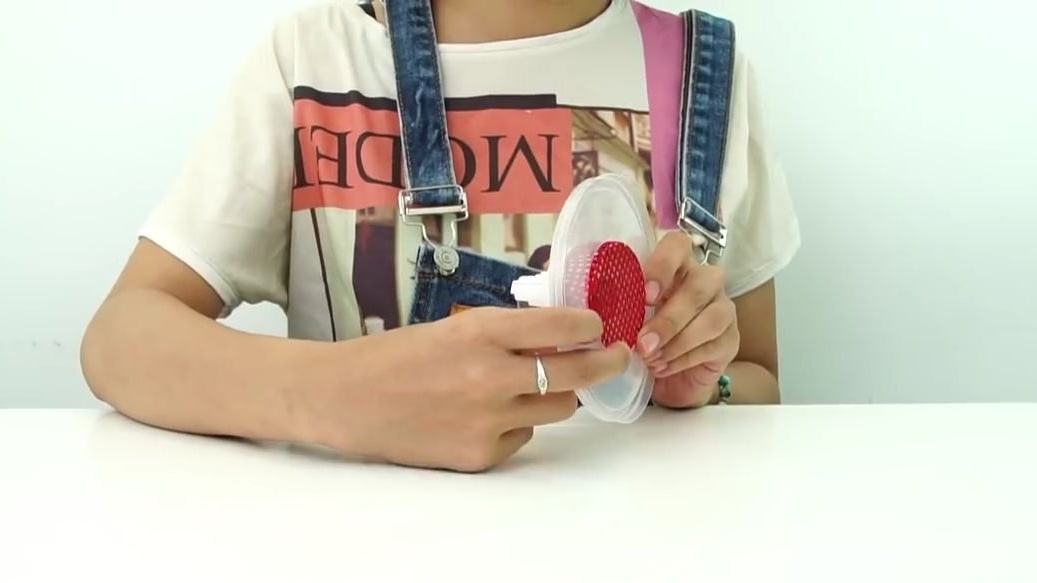
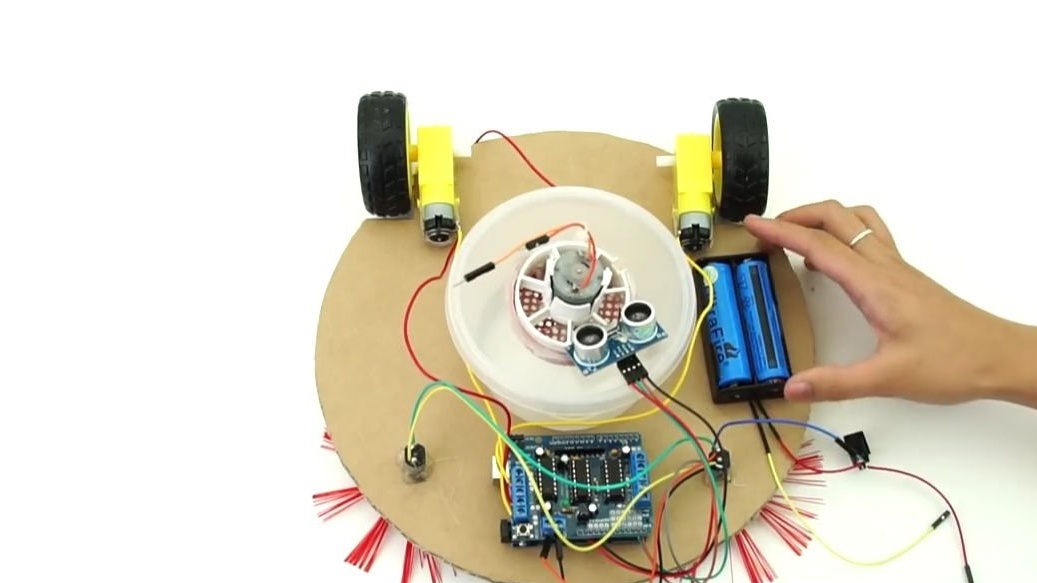
Teraz potrebujeme elektrický motor s turbínou, ktorá dokáže nasávať vzduch, a vo všeobecnosti môže prísť veľmi silný chladič. Na prednú časť turbíny sme nasadili a pripevnili plastovú sieť, je potrebné ju chrániť, to znamená, aby sa zabránilo vniknutiu a vysievaniu veľkých úlomkov. Odstráňte veko z plastovej nádoby. Nádoba by mala mať prednostne kruhový tvar. Vo veku vytvoríme rovnomerný kruhový otvor, do ktorého musíte vložiť a prilepiť turbínu pomocou sieťky. V samotnom kontajneri vytvoríme malý obdĺžnikový otvor s okrajom. Veko s turbínou položíme na nádobu a je hotovo. Sacia časť robota je hotová. Chcem vám pripomenúť, že všetko sa musí urobiť tak, ako je to znázornené na fotografii nižšie:



Berieme základňu robota a nainštalujeme nádobu s turbínou do stredového otvoru a všetko pevne prilepíme horúcim lepidlom. Potom na strane konštrukcie inštalujeme krabicu s 18650 batériami a spínač pripojený k jednému z drôtov vychádzajúcich z tejto krabice. Pripájame nové káble na napájanie Arduina, robíme konečné zrážky a môžeme pokračovať.
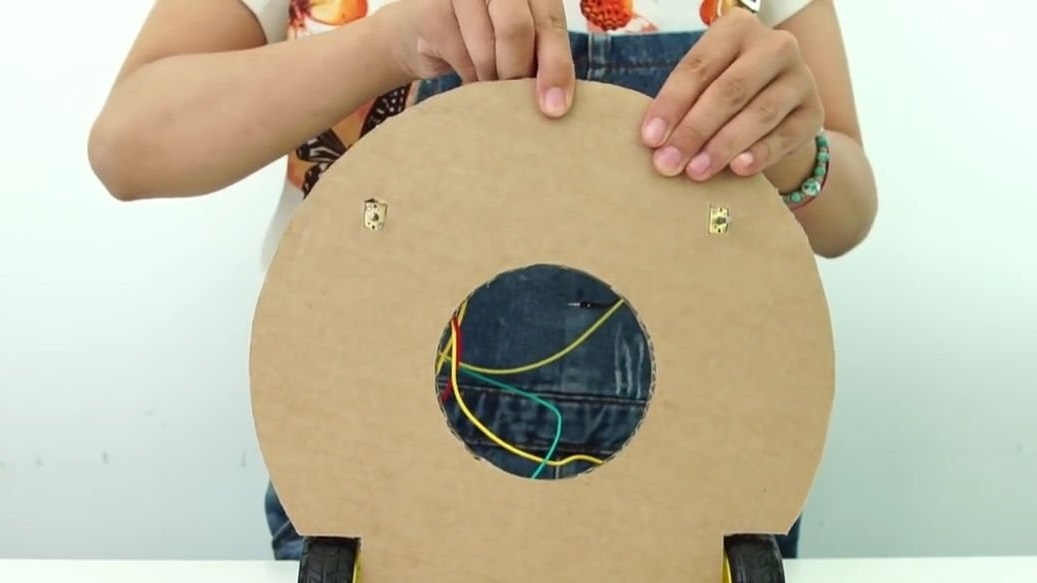
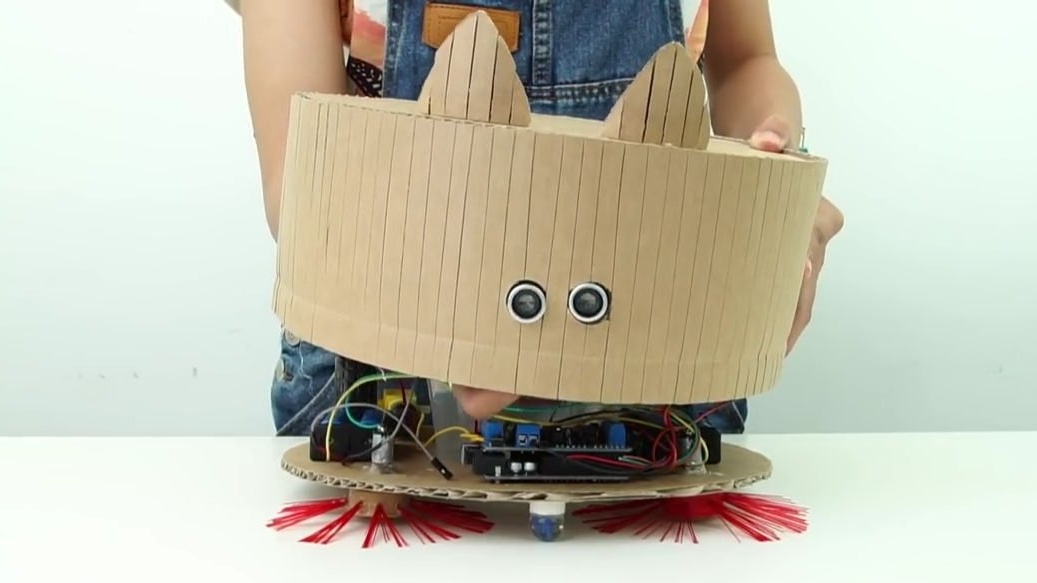
Ultrazvukový zameriavač vkladáme do špeciálnych otvorov, ktoré je potrebné urobiť vopred v tele robota. Táto budova, ako si možno pamätáte, bola vytvorená na začiatku. Autor článku pridal aj ozdobné prvky vo forme uší a namiesto očí vychádza ultrazvukový diaľkomer, všetko vyzerá veľmi dobre. Púzdro položíme nad základňu konštrukcie a opravíme ho, ale nie príliš, pretože v takom prípade budete musieť na nabíjanie získať batérie.Model na nabíjanie batérií môžete samozrejme nainštalovať priamo do robota, je však nepravdepodobné, že by sa nahradilo kvalitné nabíjanie.
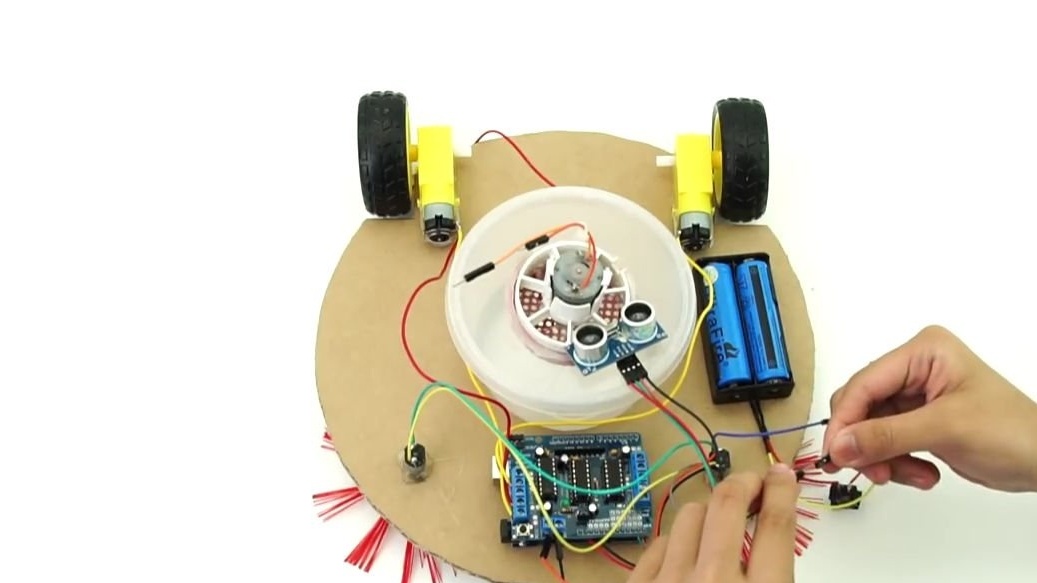

Zostáva iba nahrať firmvér do spoločnosti Arduino, vo všeobecnosti je to najlepšie po pripojení všetkých elektronických komponentov na kontrolu obvodu a kódu, ale môžete to urobiť neskôr. Najlepšie je napísať skicu na nalievanie na Arduino sami, ale na internete môžete jednoducho nájsť hotovú skicu pre robotov s jedným ultrazvukovým senzorom, ktorý obchádza prekážku. Výhoda takýchto náčrtov je teraz kompletná. Aby ste sa vyhli rôznym nástrahám, je lepšie písať samostatne pre seba.
No, to je všetko! Jednoduchý a funkčný robotický vysávač je pripravený a zostáva len otestovať! Ak to chcete urobiť, jednoducho ho zapnite a začnite jazdiť na podlahe a vysajte všetok odpad. Robot sa pohybuje, keď sa prekážka blíži, a otáča sa, čo je oveľa pohodlnejšie ako predchádzajúce modely.



Tu je video od autora s podrobným zostavením a domácimi testami:
Môžete tiež poháňať tohto robota z výkonnej banky, môžete vidieť moju podrobnú recenziu pre dobrú, samozrejme, ktorá sa bude zaujímať o toto:
Všetci majú veľa šťastia v budúcich projektoch, priatelia!