

Chcete bojovať medzi robotmi pavúka? Potom si pozorne preštudujte tento článok, v ktorom vám Majster povie, ako vytvoriť takého pavúka. A kvôli prehľadnosti jeho práce sa pozrime na video.
Náradie a materiály:
Pre pavúka
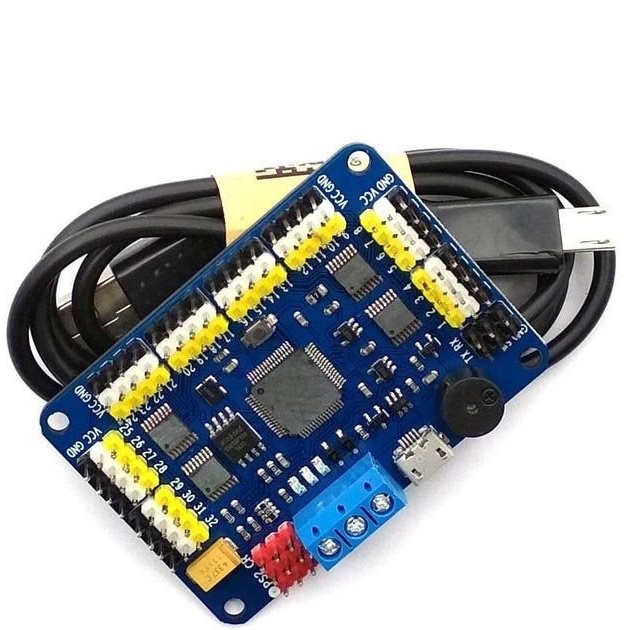
32-kanálový servopohon;
-Wemos D1 Mini ovládač;
- Servopohony MG90S - 18 ks;
-Ubec 6A 5V ovládač;
- DC-DC buck prevodník;
- svetre;
-Akkumulyator;
Pre vežu
- Dva motory;
-Výkonný modul;
- spúšťací konvertor;
-Servoprivod;
-3D tlačiareň;
- Lepiaca pištoľ;
-Kley;
- skrutkovač;
-Krepezh;
- Obojstranná páska;
-Kusachki;
-Nozh;
-Nadfili;
-Plastické guličky;
-Doplnkové príslušenstvo;






Krok 1: Tlač častí
Najprv musíte vytlačiť podrobnosti tela a nôh na 3D tlačiarni. Môžete si tu stiahnuť súbory na tlač odkaz.


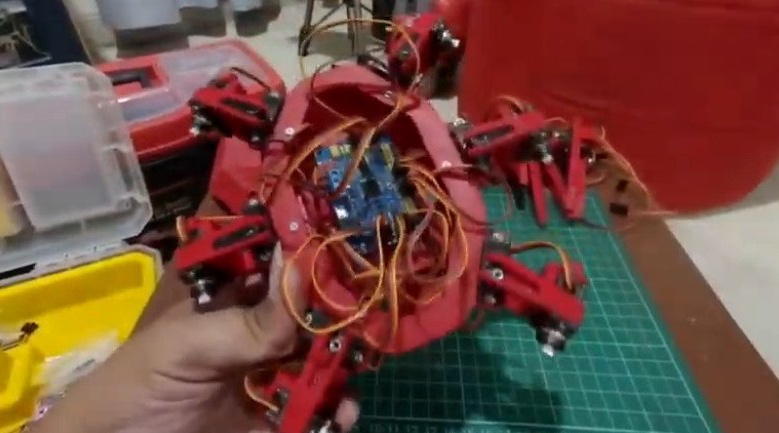
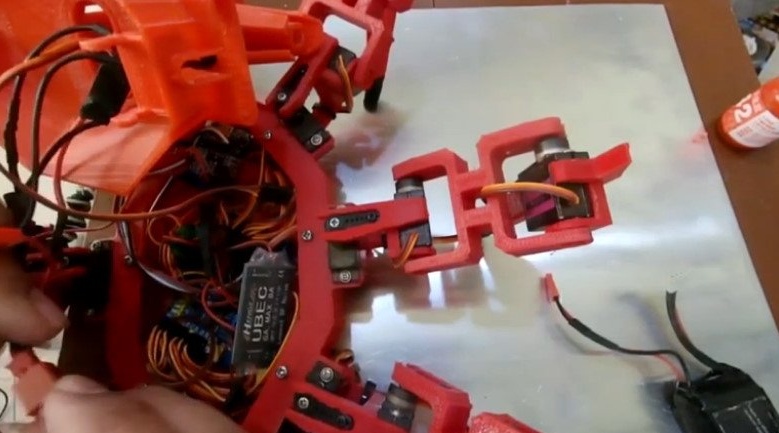
Krok dva: Zostavte
Teraz musíte zbierať robopauk.
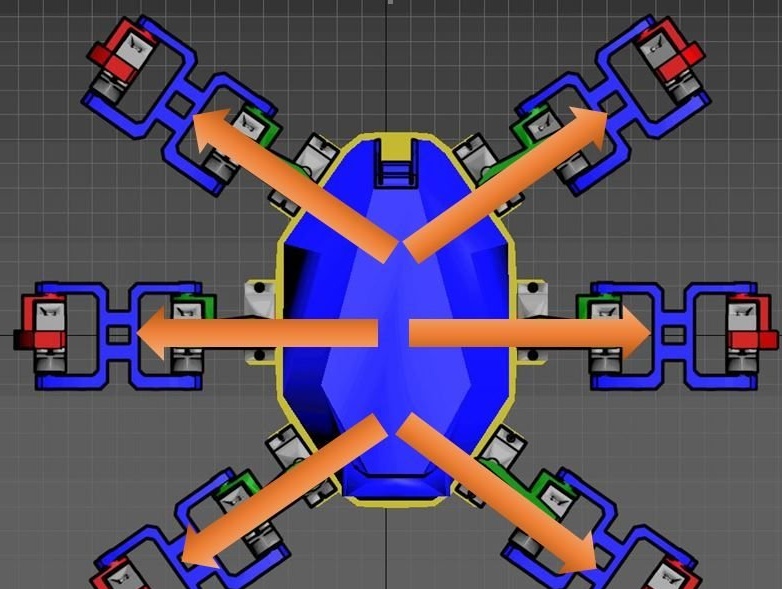
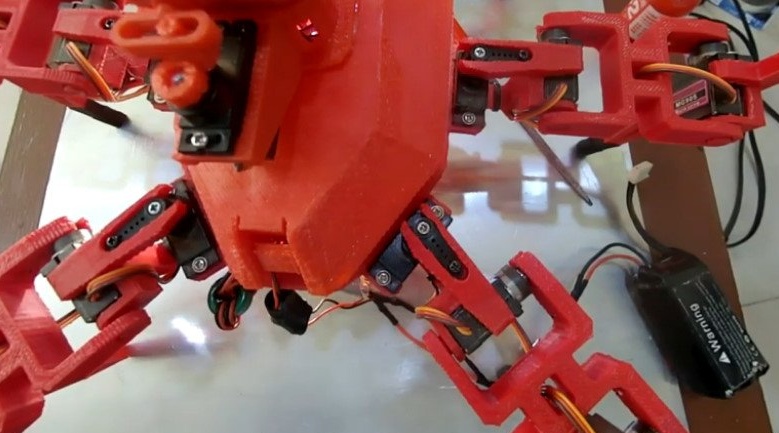
Majster inštaluje servá na kĺby nôh pavúka. Celkovo má robot na každej nohe šesť nôh a tri servá.








Nainštaluje servá na platformu šasi.




Pripevňuje prvé kĺby nôh k servom plošiny.




Vodiče sú vtiahnuté do technologických otvorov a spojené s ovládačom.





Inštaluje pahýly.


Vytvára druhé kĺby nôh. Slúži na pripojenie vodičov zo serv k riadeniu.






Nainštaluje tretí kĺb. S týmto spojom sa pavúk pri pohybe opiera o povrch.


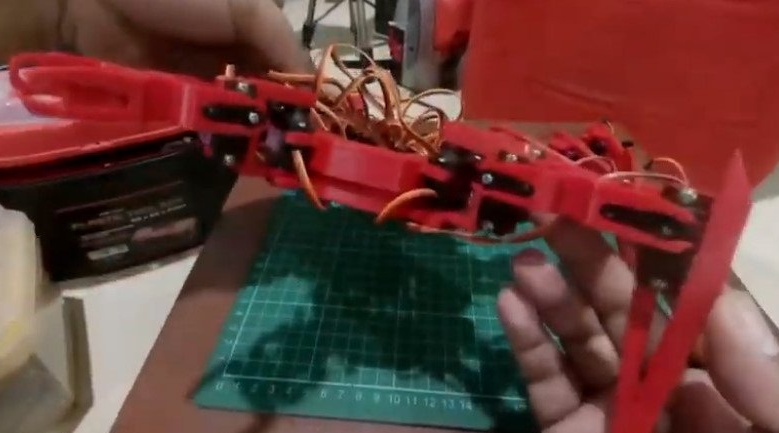

Spája a kontroluje činnosť každého servopohonu.



Ak všetko normálne zafixuje vodiče pomocou remienkov, nainštaluje batériu a zatvorí kryt.



Proces zostavenia môžete vidieť vo videu.
Krok tretí: Asi elektronika
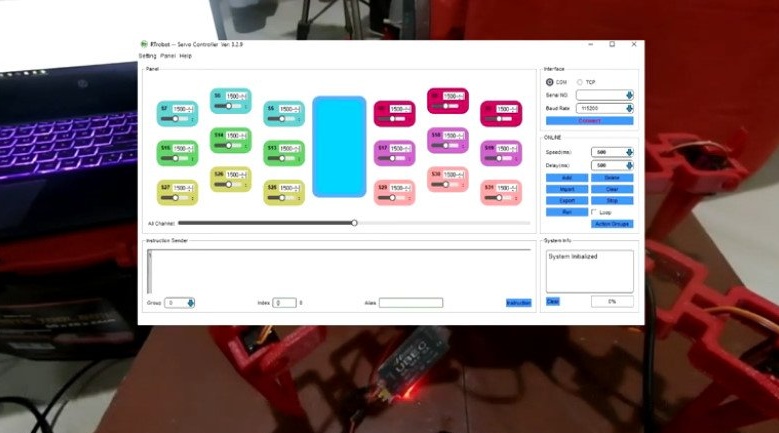
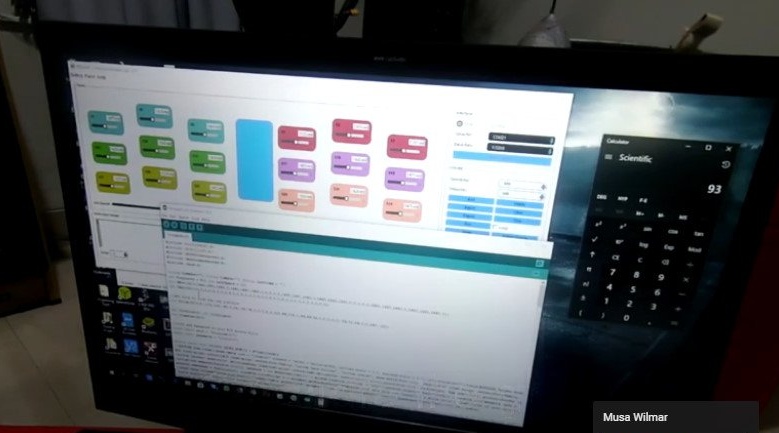
Sprievodca pomocou ovládača servopohonu RTrobot ovládal pohyby. Program riadenia je možné stiahnuť tu alebo tu.
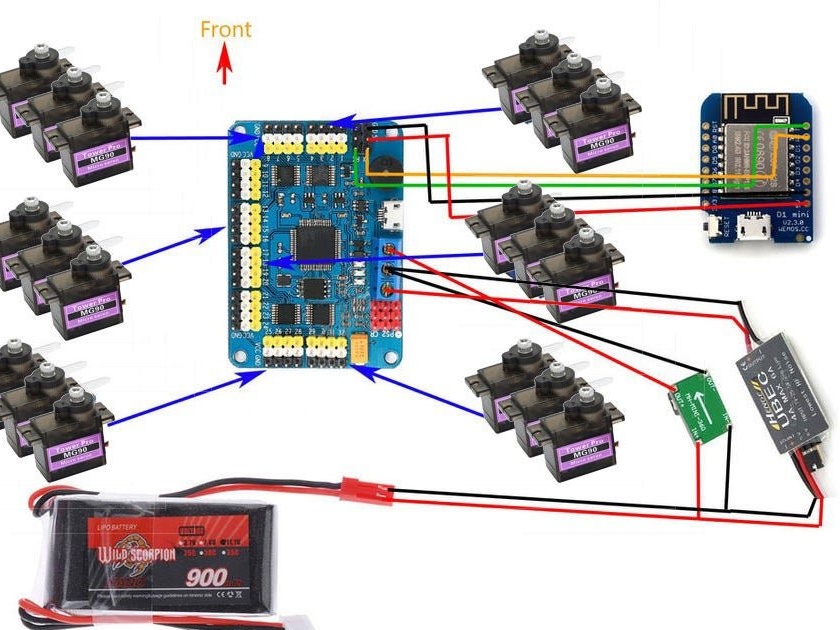
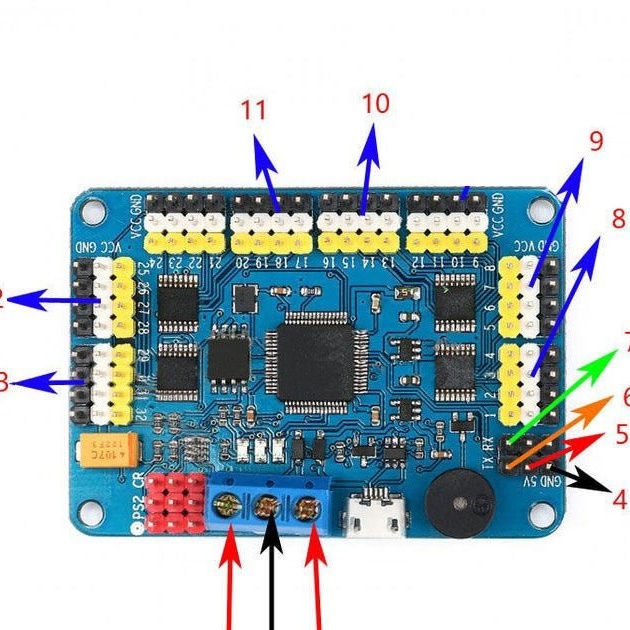
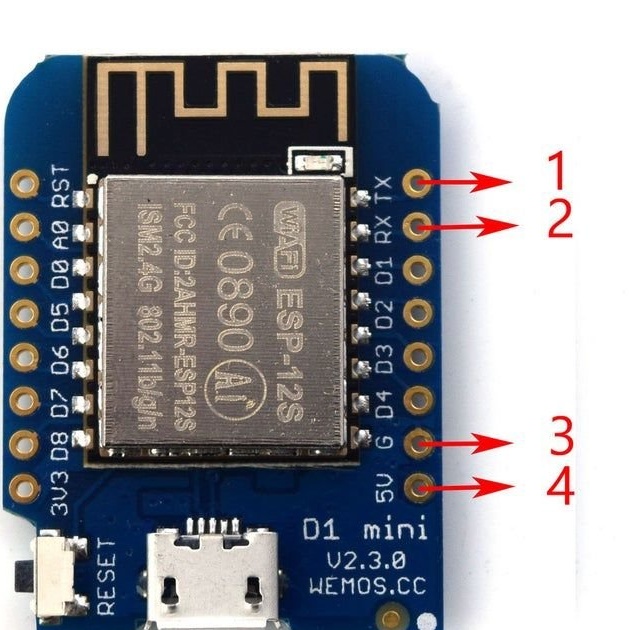
Všetko je spojené nasledovne:
1. Výstup 5 V (+) UBEC
2. Zem z UBEC a prevodníka doláru
3. Napájanie 5 V (+) z prevodníka
4. Na kolíku Wemos D1 mini G
5. až Wemos 5v
6. až Wemos D1 RX
7. Wemos TX
Servopohony sú pripojené na piny 8 až 13.
Nainštalujte kód na NodeMCU. Môžete si ho stiahnuť tu.
WeMos D1 mini je minimálna karta Wi-Fi ESP8266.
Použitím zariadenia wemos D1 mini ako prístupového bodu WIFI môžete poslať sériový príkaz do ovládača serva. Všetko, čo potrebujete, je iba zabaliť dosku nodeMCU kódom a môžete pripojiť smartphone k AP nodeMCU. Potom pomocou webového prehľadávača prejdite na stránku http://192.168.4.1.
Je to dôležité.
po zapnutí serva sa všetky serva presunú do pôvodnej / štandardnej polohy
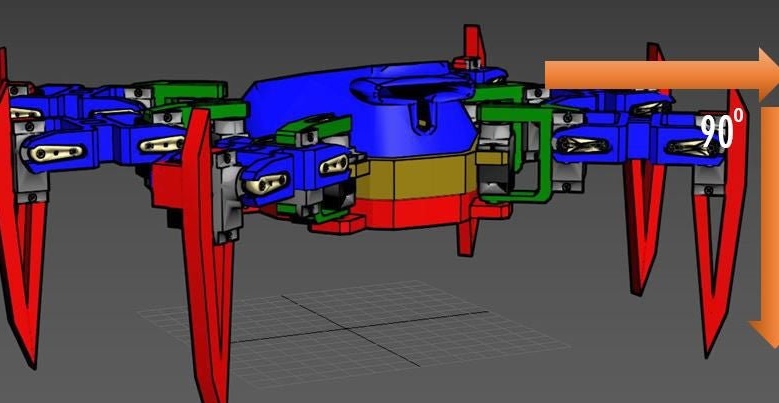
nainštalujte servá čo najpresnejšie, ako je to znázornené na obrázku vyššie alebo do videa
nastavte polohu kĺbov, vypnite a znovu zapnite zariadenie, aby ste sa uistili, že všetky nohy sú v správnej polohe
ak sa kĺby držia, trite, upravte polohu.
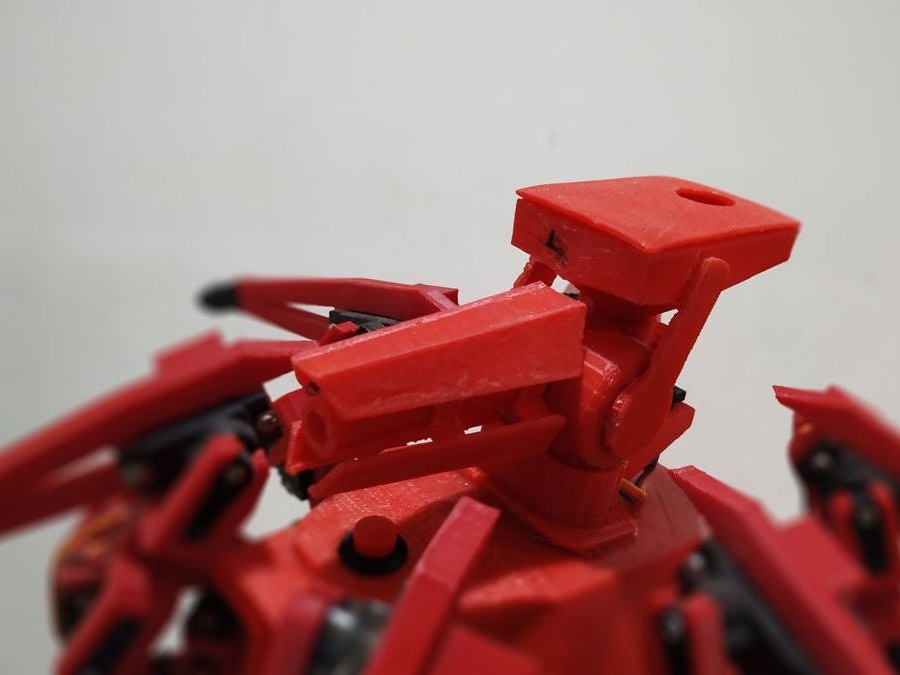
Krok 4: Veža
Teraz sa obraciame na zostavenie veže.
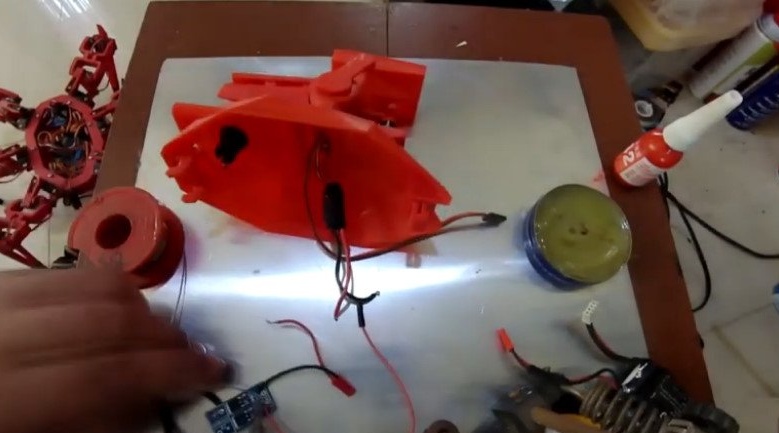
Najprv je potrebné vytlačiť podrobnosti o veži. Tu si môžete stiahnuť súbory odkaz.
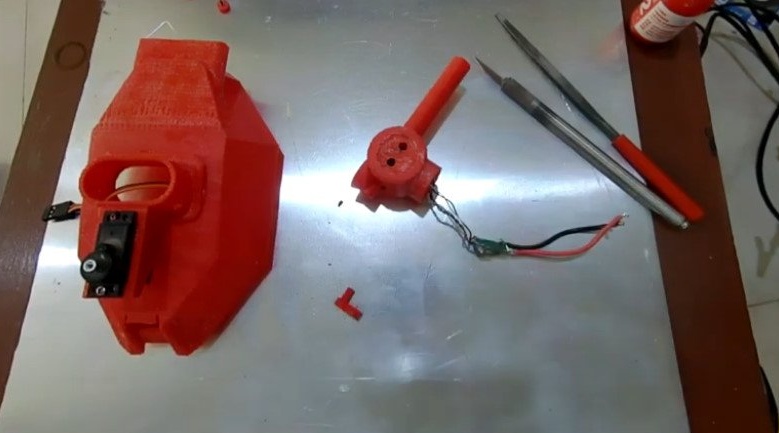
Potom pán pokračuje v zostavovaní veže. Okruh na otočenie veže a pripojenie elektrických častí je uvedený nižšie.
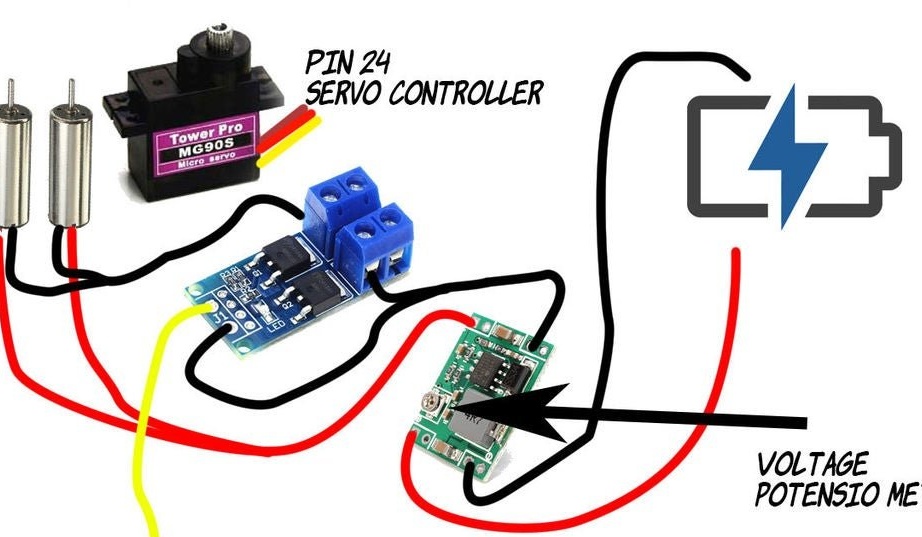
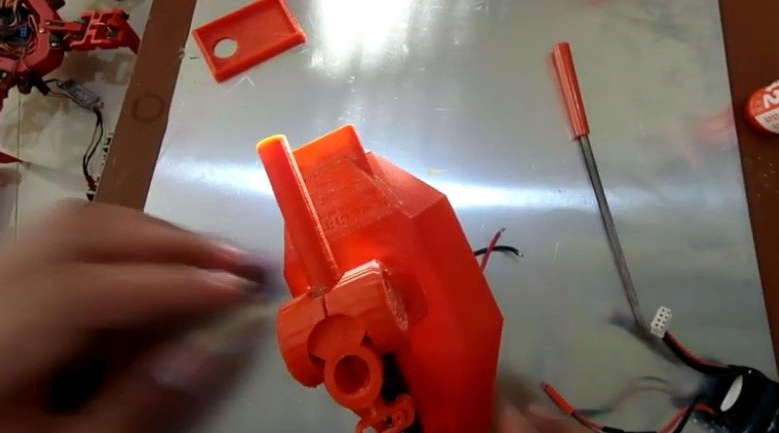
Nainštaluje servo na vežu.







Obojstranné pásky sa lepia na valčeky.


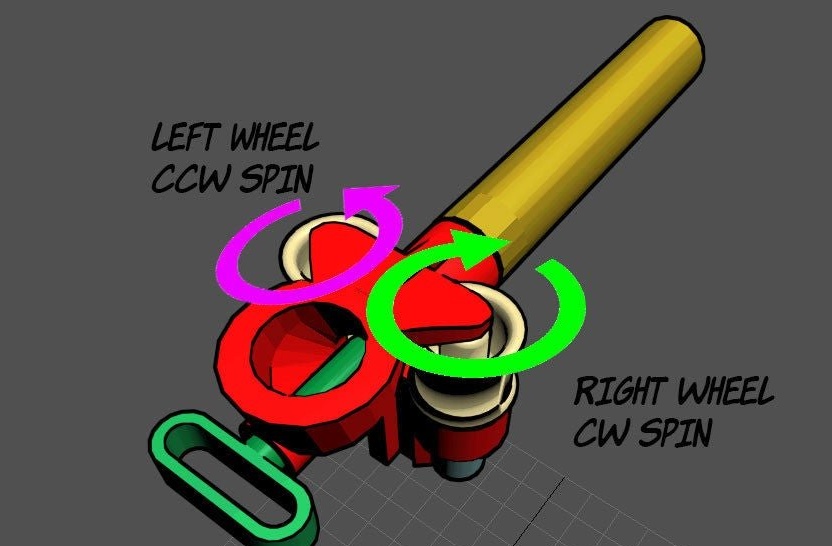
Zbiera zbraň. Inštaluje motory do držiaka. Inštaluje valčeky na hriadele motora.







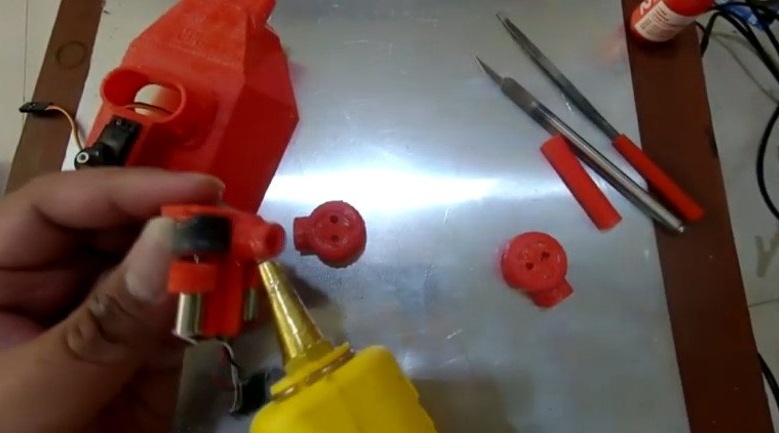
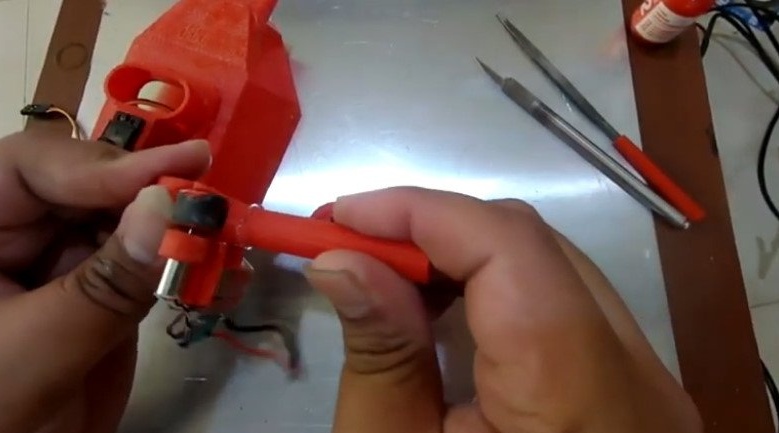

Spája káble a zbiera vežu.




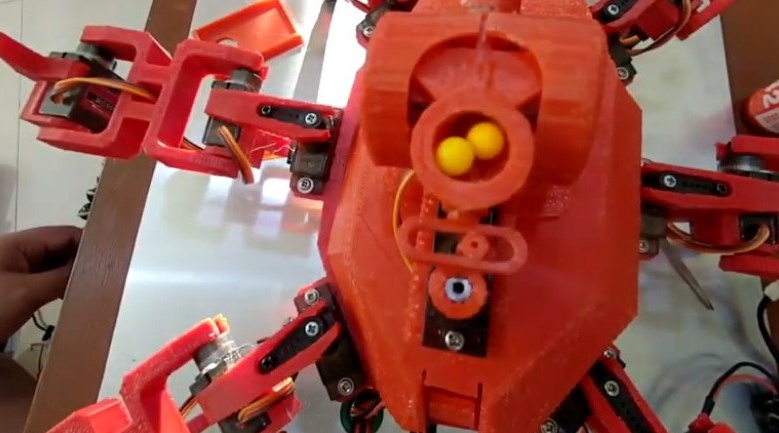
Naloží náboje a skontroluje činnosť pištole. Mechanizmus sa dá nastaviť pohybom držiaka na hriadeli servopohonu.


Zabezpečuje konečné pripojenie, montáž a kontrolu.




Video so zostavou veže je možné vidieť nižšie.
Všetko je pripravené. Zhromaždite ešte jedného takého robopauk a môžete usporiadať boje.
