

Robiť takého robota vlastnými rukami nebude vôbec ťažké a dokonca ani zaujímavé. Výsledkom je veľmi zaujímavé zariadenie, ktoré sa bude správať ako živé zviera. To všetko vďaka dvom malým motorom riadia robota. Zmenou uhla útoku na hriadele motora môžete robota urobiť rýchlejšie alebo pomalšie. Môžete tiež experimentovať s rôznymi tipmi, ktoré môžete nosiť na hriadeli motora.
Materiály a náradie:
- dva malé motory (3 V, nájdete v detských hračkách);
- držiak na batérie (môžete to urobiť sami alebo vytiahnuť zo starého diaľkového ovládača, baterky atď.);
- dva prepínače typu SPDT (možno ich získať zo starej počítačovej myši);
- dve malé a jednu veľkú kancelársku sponku;
- malé koleso z hračky;
- tenké vedenie

Výrobný proces:
Prvý krok. Spájkovacie káble
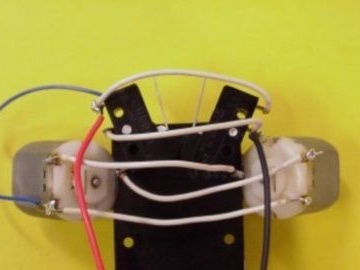
Najskôr musíte pripraviť vodiče a spájkovať ich so všetkými elektronickými komponentmi, aby ste neskôr mohli pohodlne pripojiť uzly. Vodiče musia byť odrezané na dĺžku 6 cm a odstránené z ich koncov asi o 1 cm. Teraz musíte spájať dva vodiče k motorom a spínačom. Nezabudnite tiež spájkovať tieto dva vodiče ku kontaktom držiaka batérie. Ostatné konce drôtov sú výhodne pocínované.

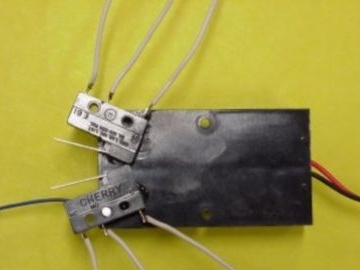
Krok dva Nastavovacie spínače
Na nastavenie spínačov musí byť držiak batérie otočený hore nohami. Teraz musíte prilepiť spínače lepidlom na držiak batérie. Výsledkom by malo byť písmeno V.
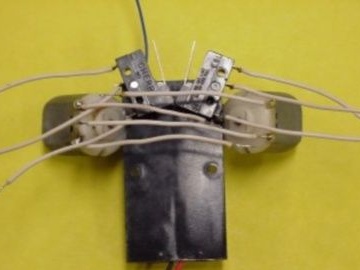
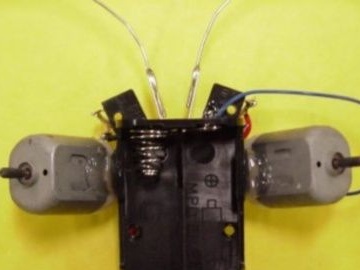
Krok tri Inštalácia motora
Motory musia byť pripevnené k držiaku batérie pod uhlom, ako je to znázornené na obrázku. Inak musia byť uhly na oboch stranách rovnaké robot nebude fungovať správne. Hriadele motora musia dosadať na cestu. Motory môžu byť namontované pomocou lepidla.

Krok štyri Inštalácia stabilizačného kolesa
Stabilizátor je potrebný, aby domáci produkt stál rovno na ceste. Na výrobu kolesa môžete použiť valček z magnetofónu alebo koleso z detskej hračky. Pokiaľ ide o „zástrčku“, je vyrobená z dlhej kancelárskej sponky alebo povrázku.Na záver sa stabilizátor prilepí rovnomerne k držiaku batérie.

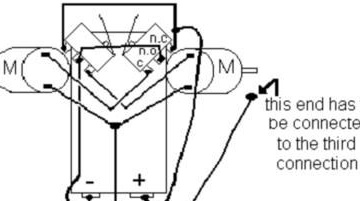
Krok 5 Elektrické zapojenie
Aby robot pracoval správne, musia byť všetky káble jasne zapojené podľa schémy. Okruh je vidieť na obrázku.

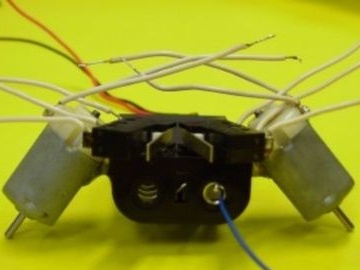
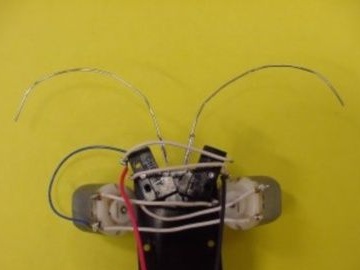
Krok 6 Vytváranie fúzy na chybu
Fúzy budú slúžiť ako koleso na chybu, hneď ako sa na ceste stretne prekážka, fúzy zapnú spínače a potom motory otočia robota v opačnom smere. Keď je spínač aktivovaný, jeden z motorov sa vypne a spustí sa určitý druh diferenciálu. Ak sú oba spínače aktivované, robot sa úplne zastaví. Fúzy sú vyrobené z malých kancelárskych sponiek, ktoré musia byť opatrne prilepené k tlačidlám spínačov.

Siedmy krok. Konečná revízia a testovanie robota
V koncovej fáze musia byť na hriadele motora namontované gumové hroty, ktoré sú potrebné na lepšie uchopenie. Môžu byť vyrobené z kambru.
To je všetko, robot je pripravený. Musíte ho spustiť na hladkom povrchu, napríklad na stôl alebo linoleum. Pretože labky chrobáka sú príliš malé, nebude sa plaziť po koberci, preto bude potrebné zväčšiť špičky na hriadeľoch motora.
V budúcnosti môže byť robot aktualizovaný podľa svojho uváženia. Napríklad môže vytvoriť oči LED, ktoré sa rozsvietia pri kontakte s prekážkou.