
Kúpil som si chladnú hračku pre môjho syna na Alí - rýpadlo na diaľkovom ovládači.
Ukázalo sa, že ide o závažnú chybu, ktorá sa prejavuje v neprítomnosti obmedzovačov výložníka. tj Ak dvíhate šípku na maximum, začne praskať, to isté platí pre rotáciu veže okolo osi (670 stupňov). Výsledkom je, že teraz je často prasklina aj pri malom zaťažení. Okolo osi sa točí s veľkými ťažkosťami spravidla v jednom smere. Toto zariadenie som rozobral a prišiel mi nápad na jeho aktualizáciu.
1. Vymeňte motory na podvozku za iné, výkonnejšie (aj keď je to teraz). A upravte rýchlosť. Teraz je rýchlosť jedna, konštantná - dopredu alebo dozadu.
2. Nastavte obmedzovače pohybu ramena, ktoré by dosiahli maximálny zdvih a zastavenie ramena, potom iba v opačnom smere.
3. Vymeňte motory v ramene za krokové motory alebo servá. Tu je skutočne potrebná pomoc porozumenia ľuďom. Čo je lepšie pre túto úlohu? A je vôbec vhodný? Bol by som rád, keby sa bagr vyrovnal s úlohami, aby sa cítil trochu komplikovanejšie ako nakladanie uvoľneného piesku, aj keď je to pre neho teraz ťažké - zariadenie prasklo ...
4. Batéria je výkonnejšia a väčšia na inštaláciu. V tomto prípade sú tu oceľové tyče na protiváhu. Môžete len vyplniť priestor. Existuje veľa priestoru pre experimenty :)
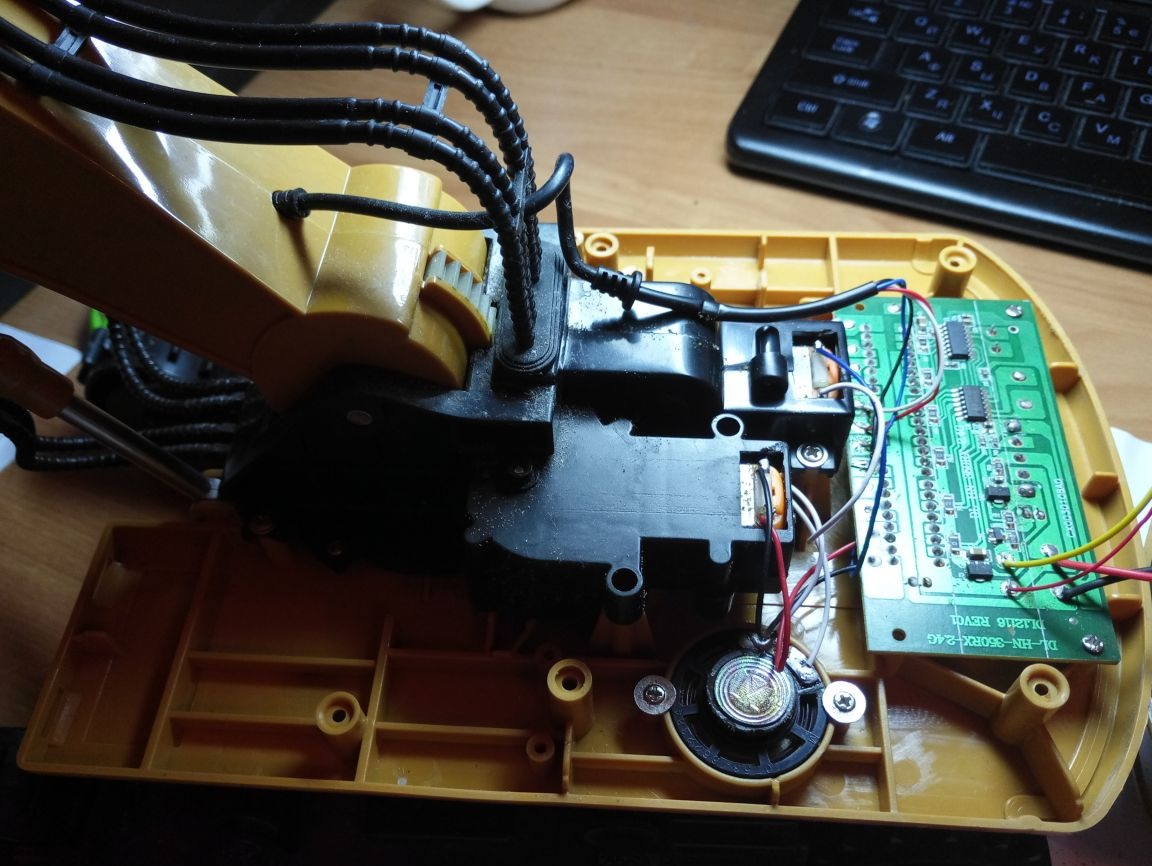
5. Preto chcem vymeniť dosku samotného rýpadla za arduino a pridať modul WiFi na ovládanie zariadenia. Diaľkový ovládač bude musieť urobiť ďalšie. Tu je otázka. Ktorú arduinku si vziať? ktorý z nich si poradí? Nano, uno? Bude potrebné pripojiť 6 motorov k arduínu (podvozok - 2, k veži a 3 k výložníku). Je pravdepodobné, že budete potrebovať stabilizátor napätia?
Čo vo všeobecnosti môžete odporučiť na implementáciu tejto myšlienky? Ak si myslíte, že táto úloha nie je uskutočniteľná, vysvetlite prosím, z akého dôvodu. Naozaj chcem robiť so svojím synom, aj keď je zvyknutý učiť sa nové veci a nie učiť sa ... :)
Fotochki.
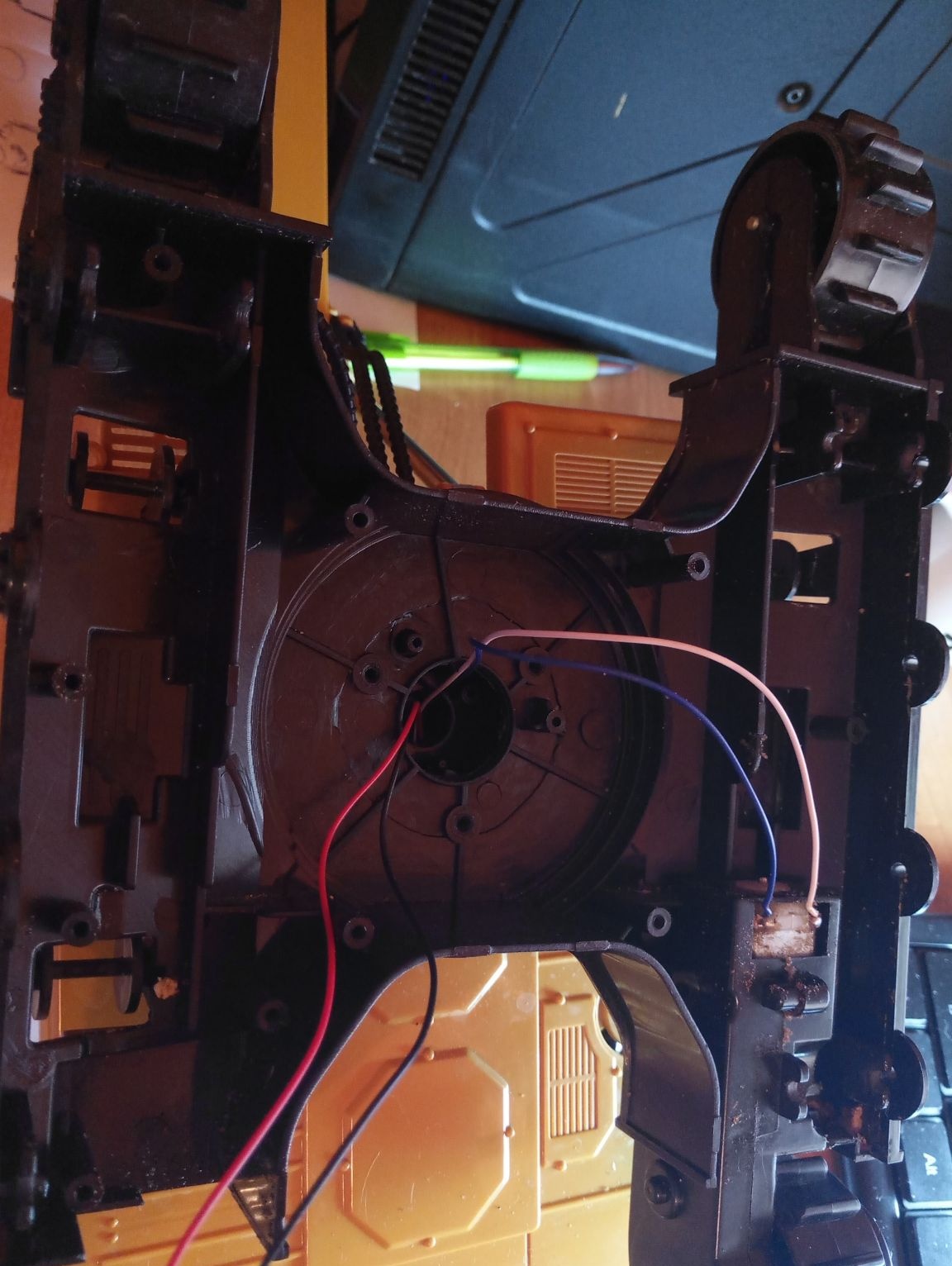
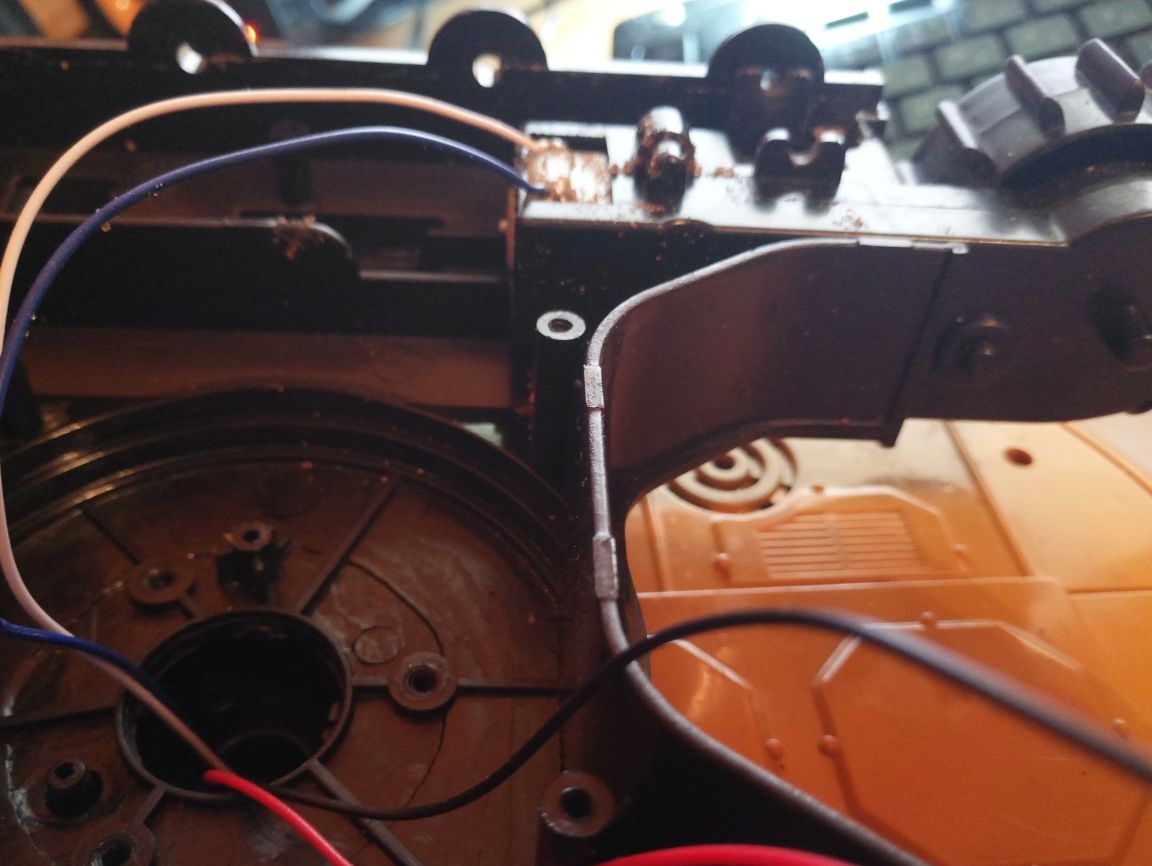
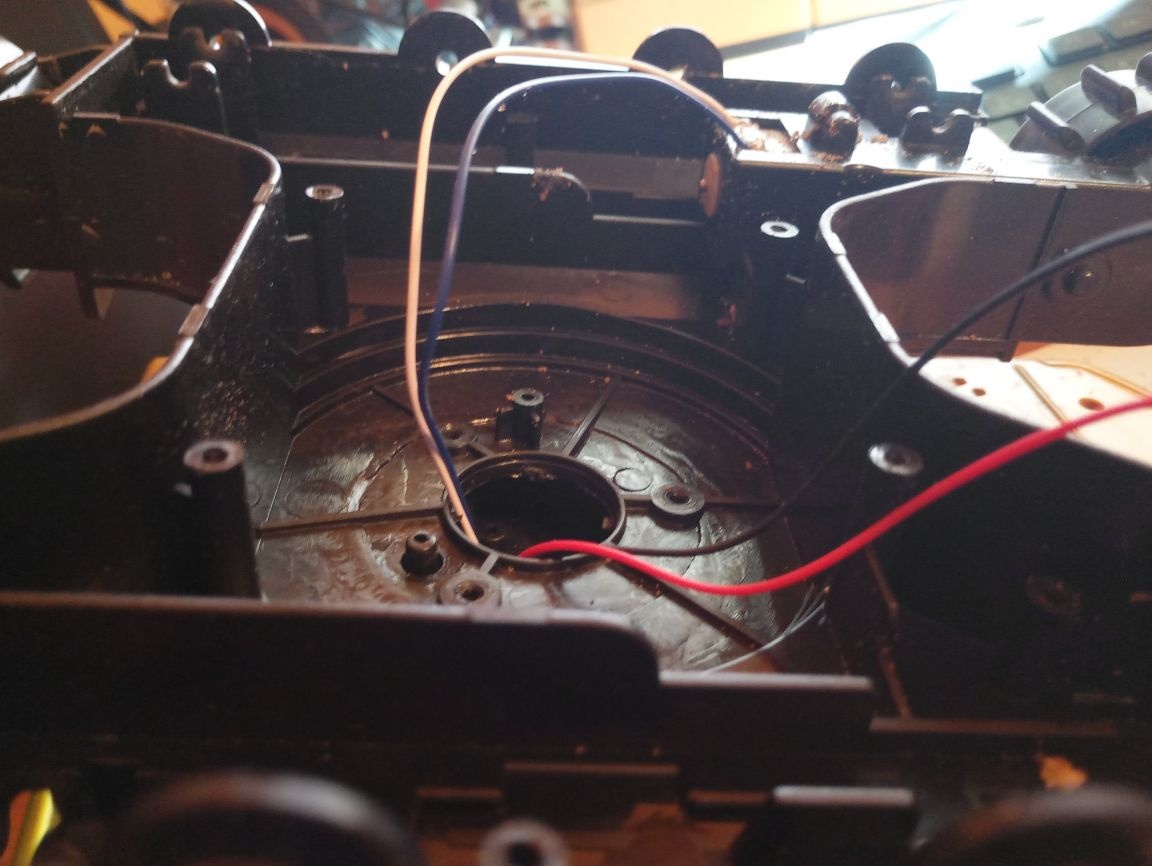
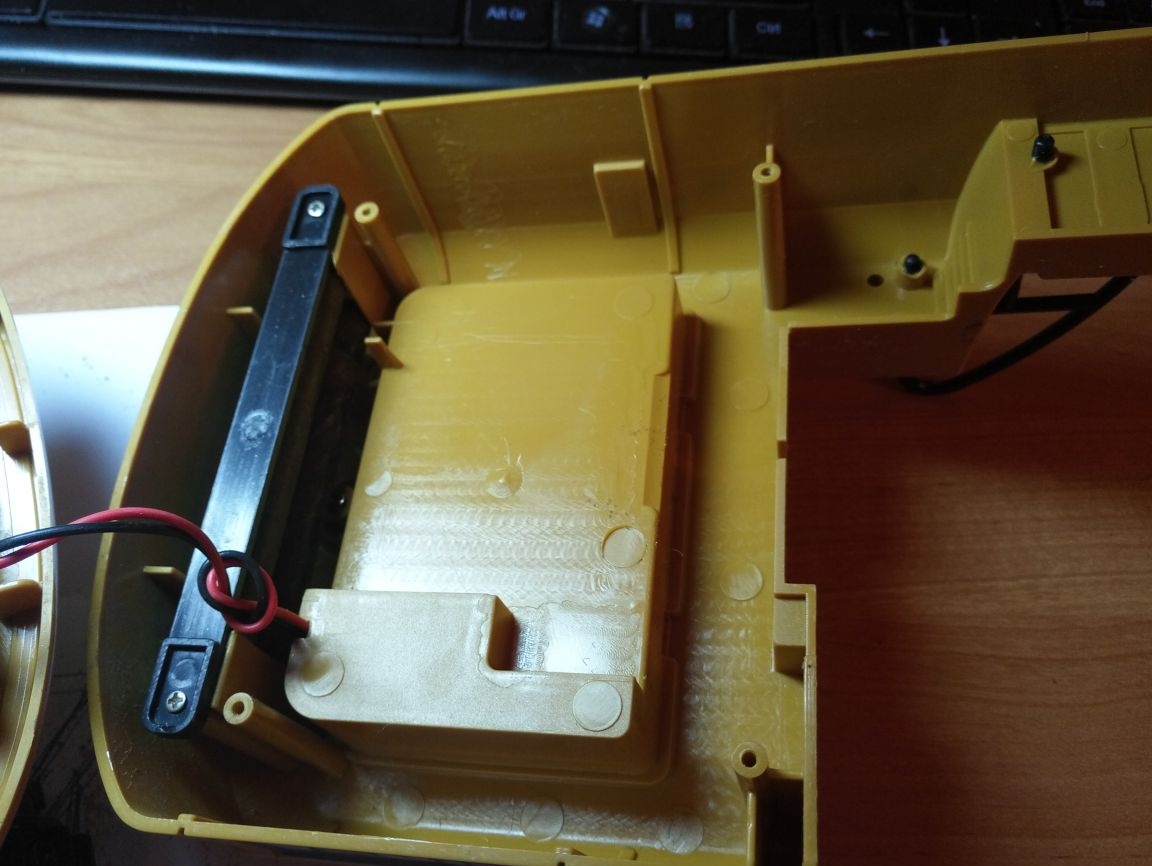
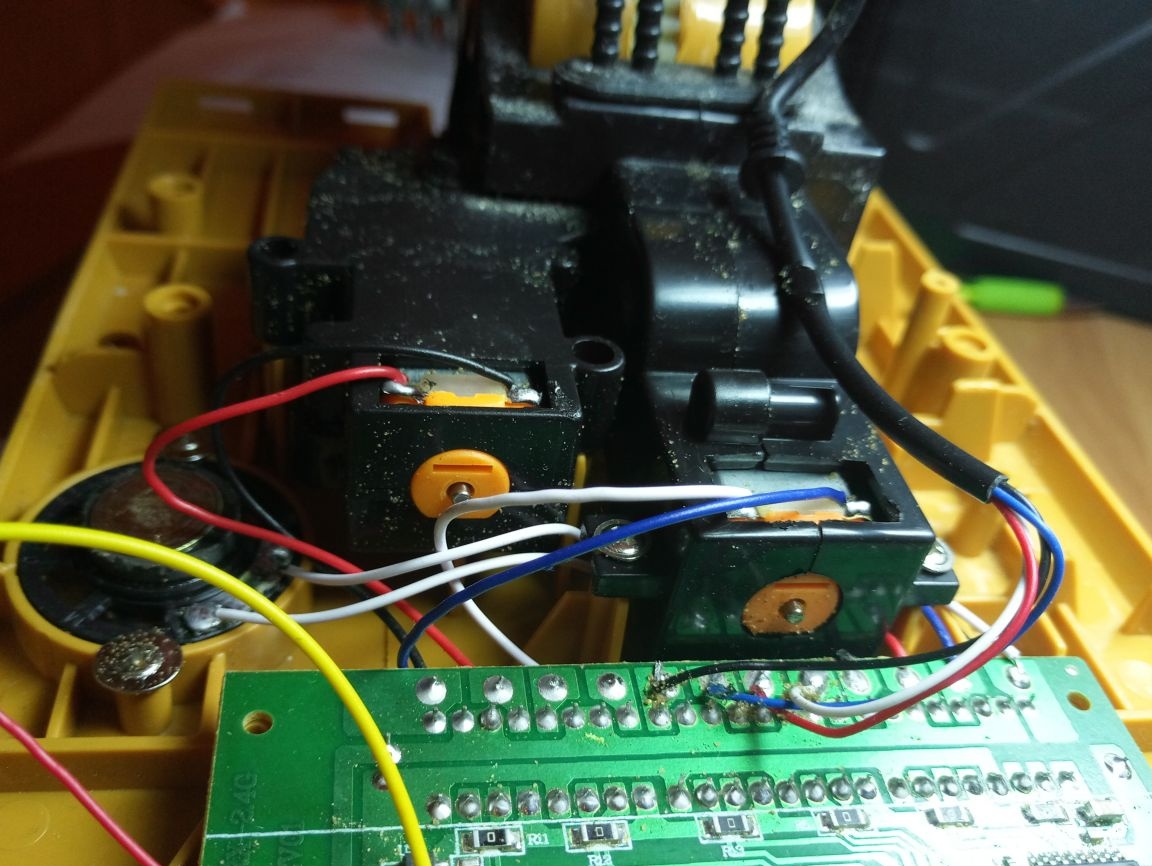
samotné mechanizmy boli rozobraté iba v podvozku, ktorý nešplhal do šípu