




Táto nádrž nie je prvou zostavou kapitána. Charakteristickým rysom tohto konkrétneho modelu je pružinové odpruženie, vybavujúce model motorom, udržiavateľnosť.
Pozrime sa na ukážku.
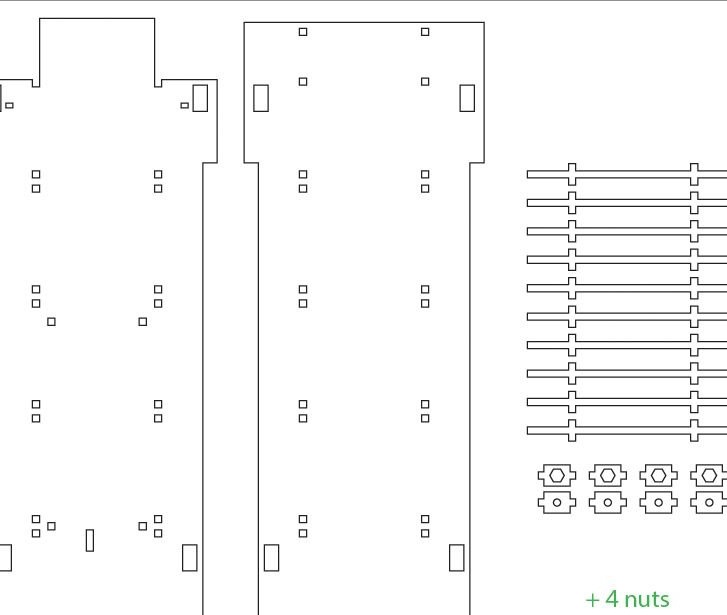
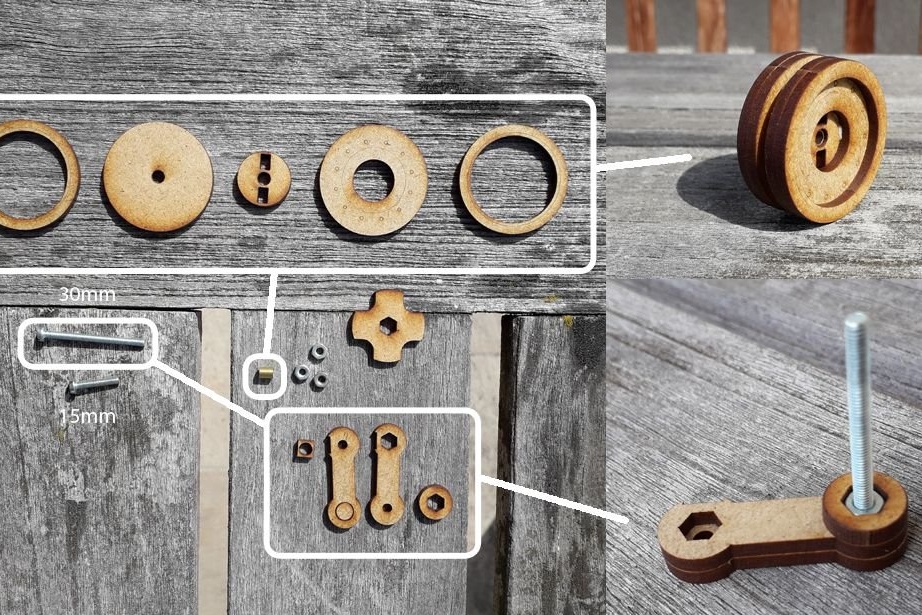
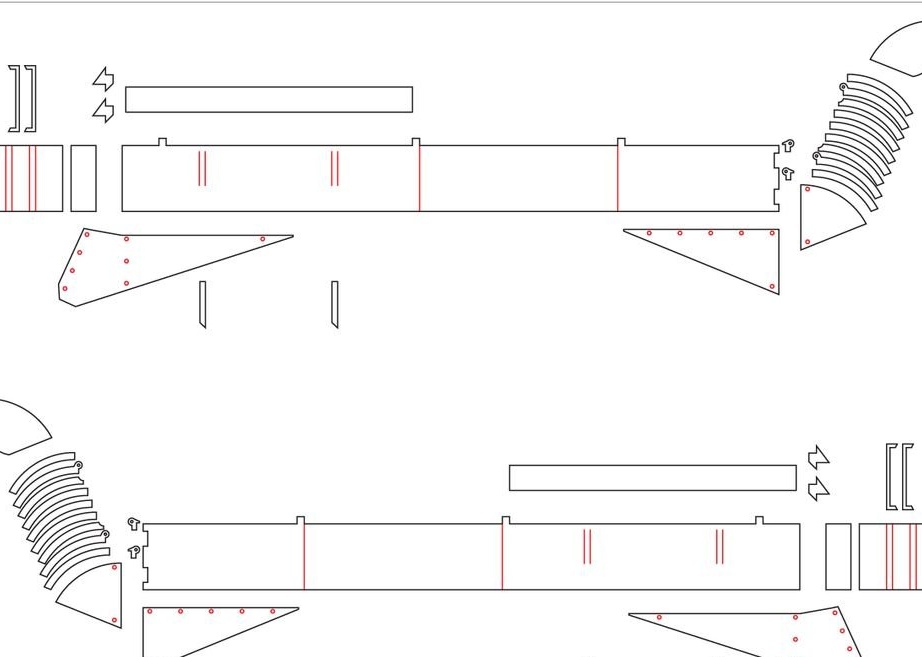
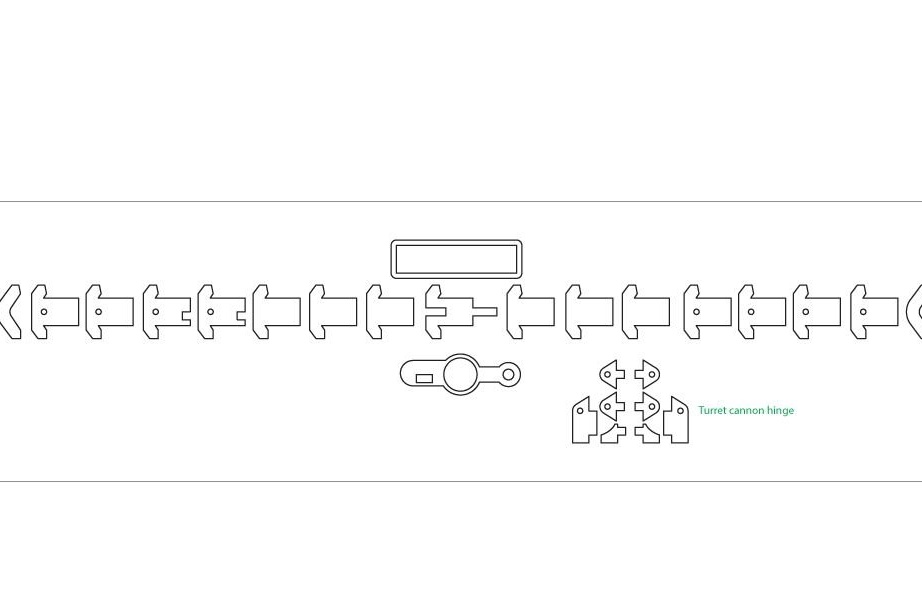
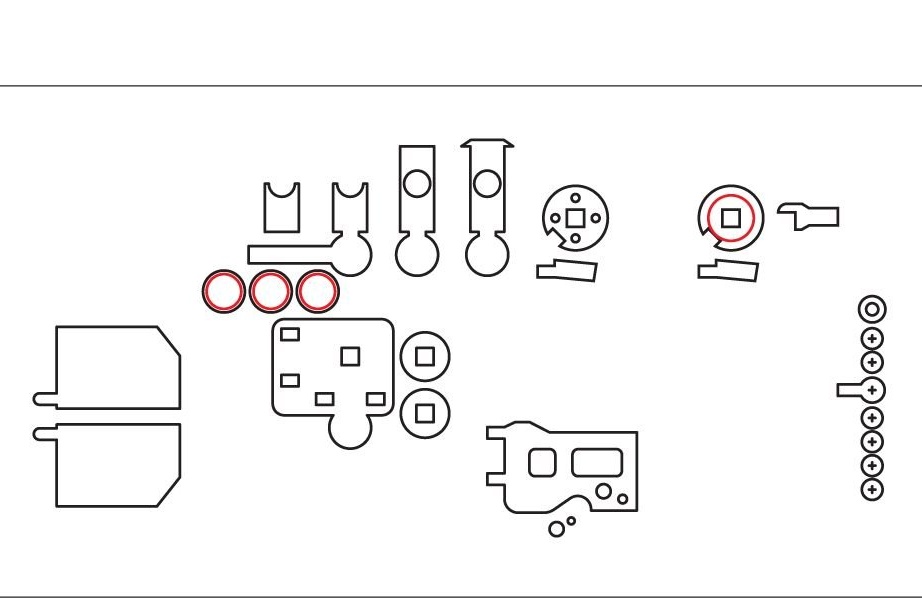
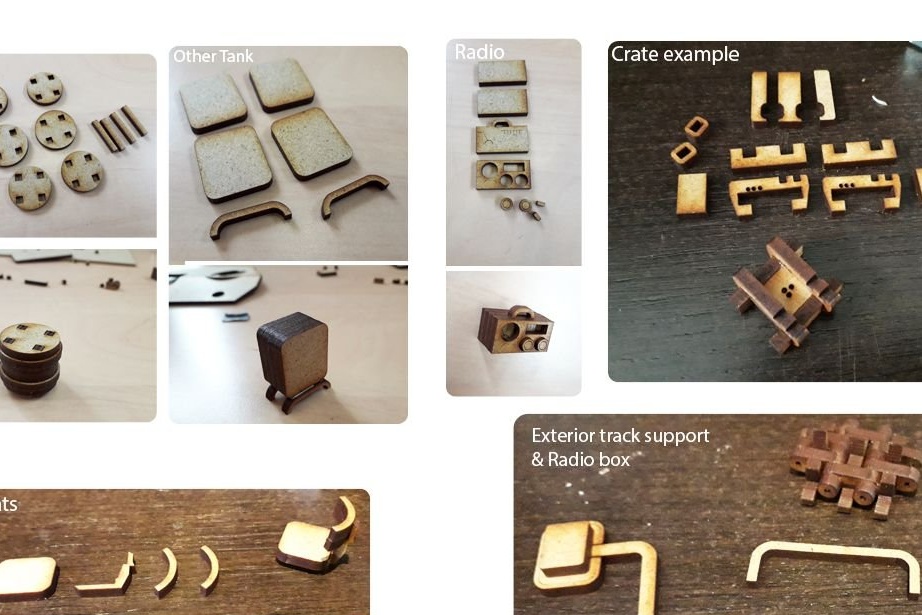
Podrobnosti o prípade sú vystrihnuté na laserovej rezačke a súbory sú k dispozícii na stránke tento odkaz.
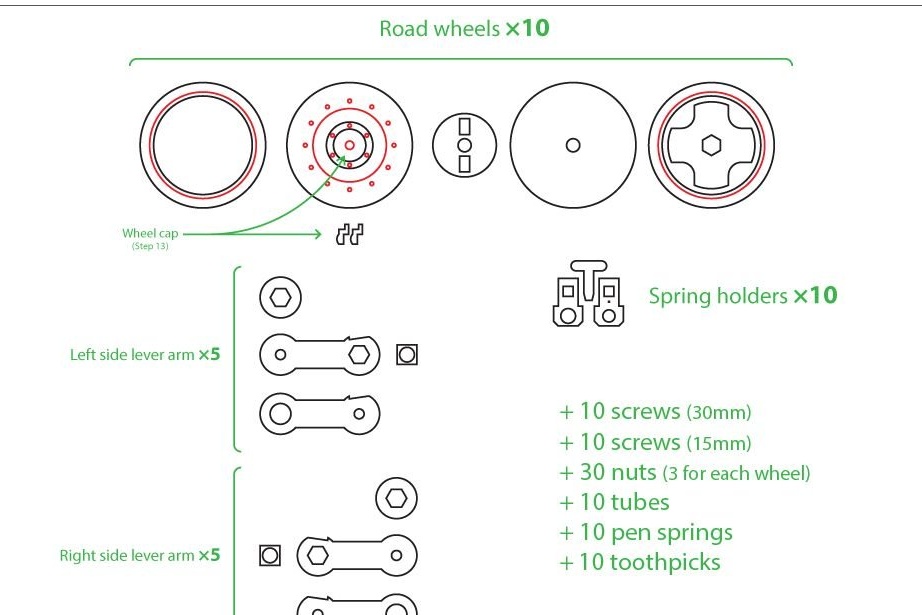
Okrem podrobností o prípade budete potrebovať aj nasledujúce
Náradie a materiály:
- Skrutky Ø 3 mm:
-14 ks 15 mm dlhé,
-10 ks dlhá 25 mm,
-10 ks 30 mm dlhá.
- Rúry x20 Ø4 mm (vnútorný priemer Ø3 mm);
-Kovový drôt Ø 1 mm;
-Ø3 mm závitová tyč;
-Spružky pre prívesky Ø 4,5 mm a dĺžka 30 mm -10 ks;
- Skrutky M4 2 ks;
-Zubochistki;
-Maketnaya doska;
Mikrokontrolér ESP8266;
- pripojenie vodičov;
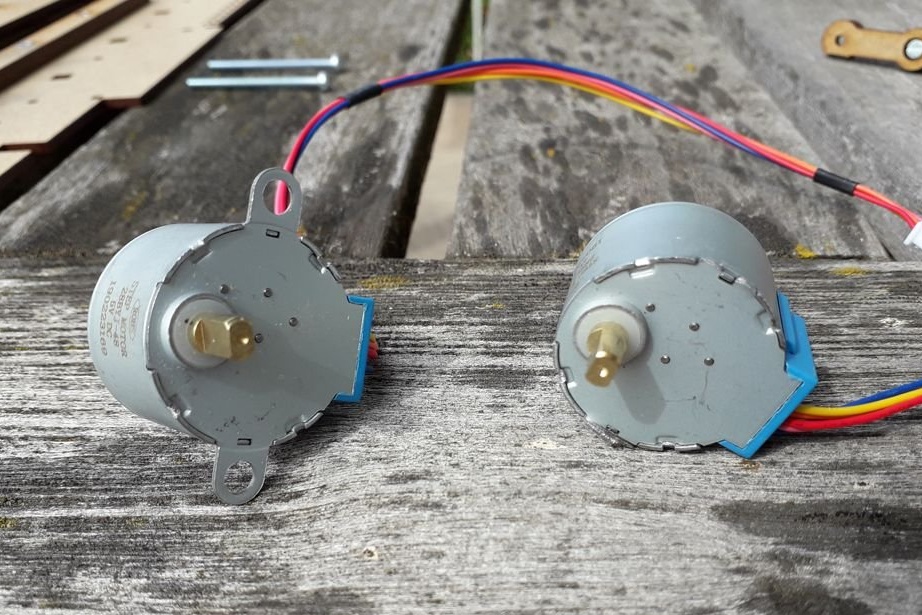
- motor 28BYJ-48 s riadiacou doskou - 2 ks;
-Batéria 5V;
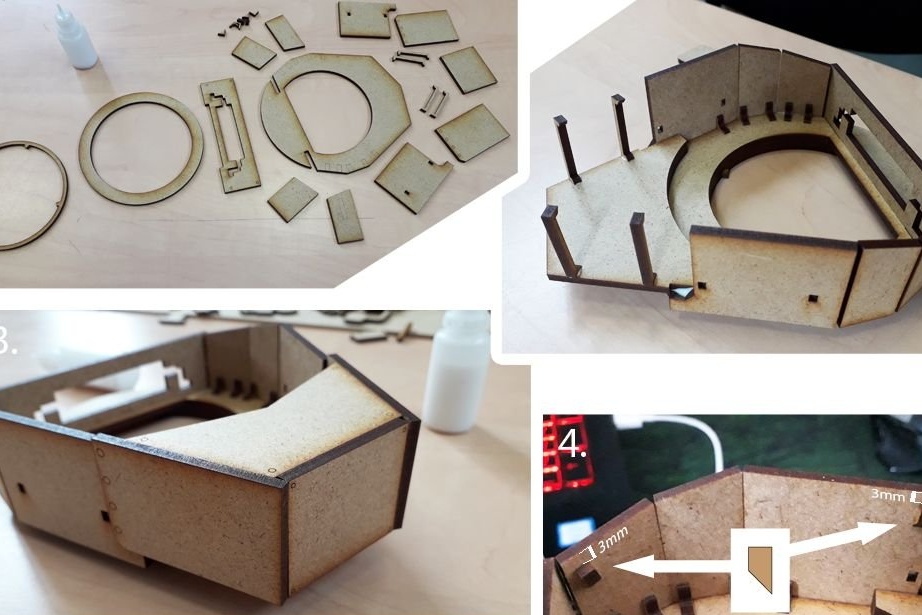
Prvý krok: Kontrola
V tomto kroku pán odhalí svoje model nádrž a tiež označuje odkaz na miesto, kde môžete vidieť nádrž v rozloženej podobe.
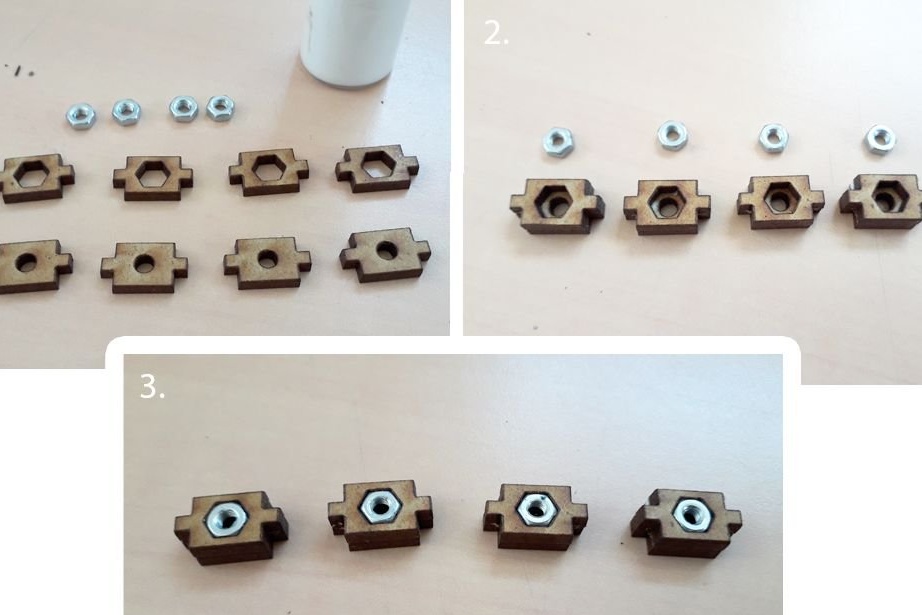
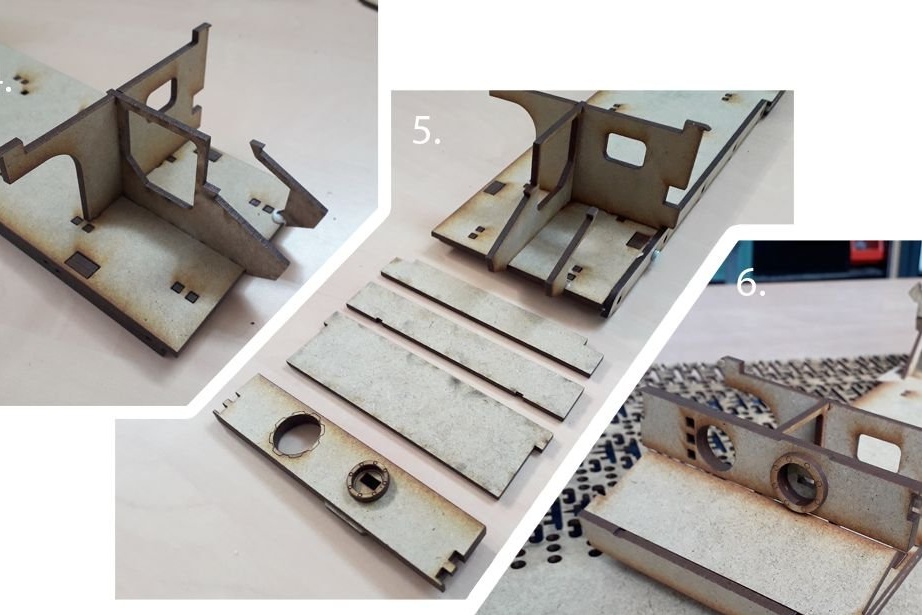
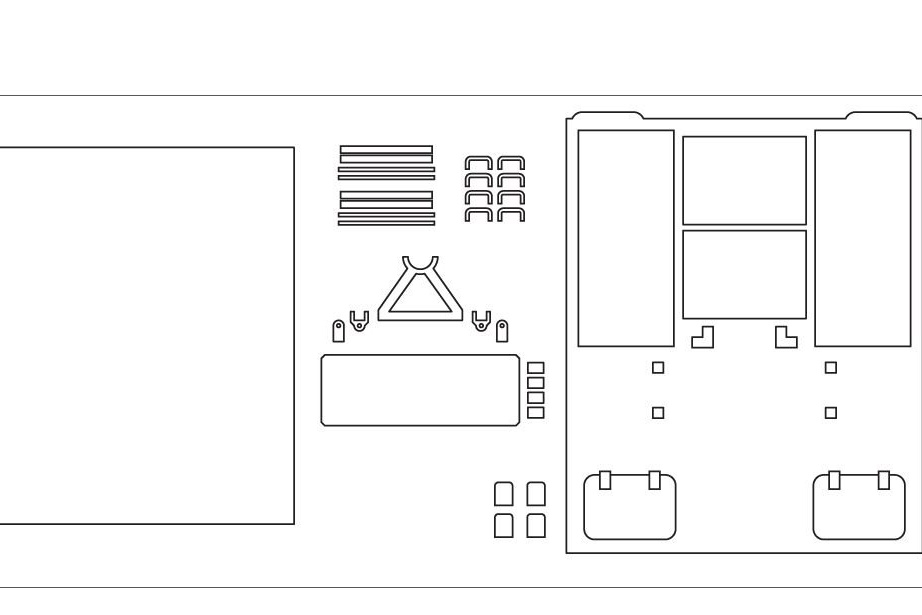
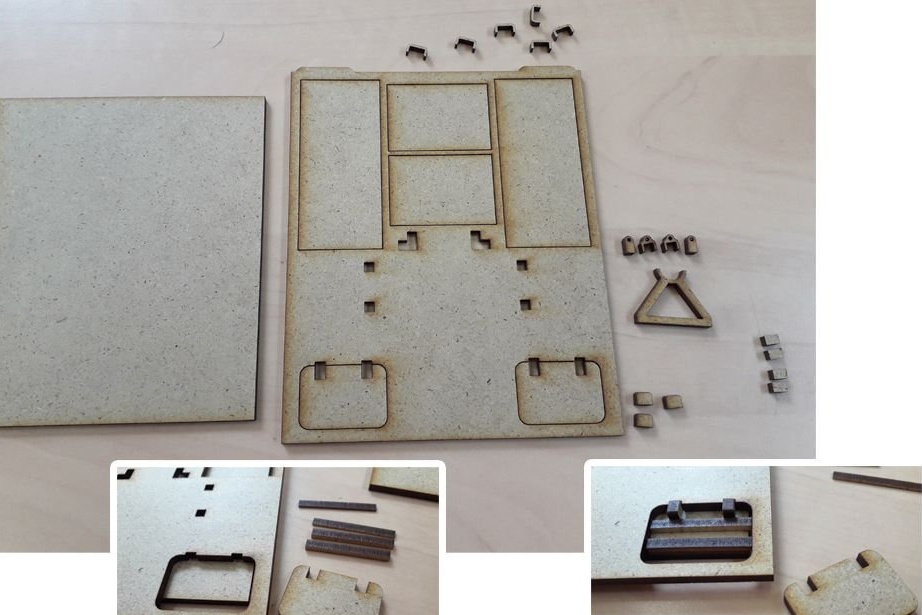
Krok dva: zdola
Kapitán sa začne montovať zo spodnej časti nádrže. Nainštaluje matice do úchytiek. Držiaky na bokoch dna. Vytvára podporu. Nastaví druhú vrstvu.
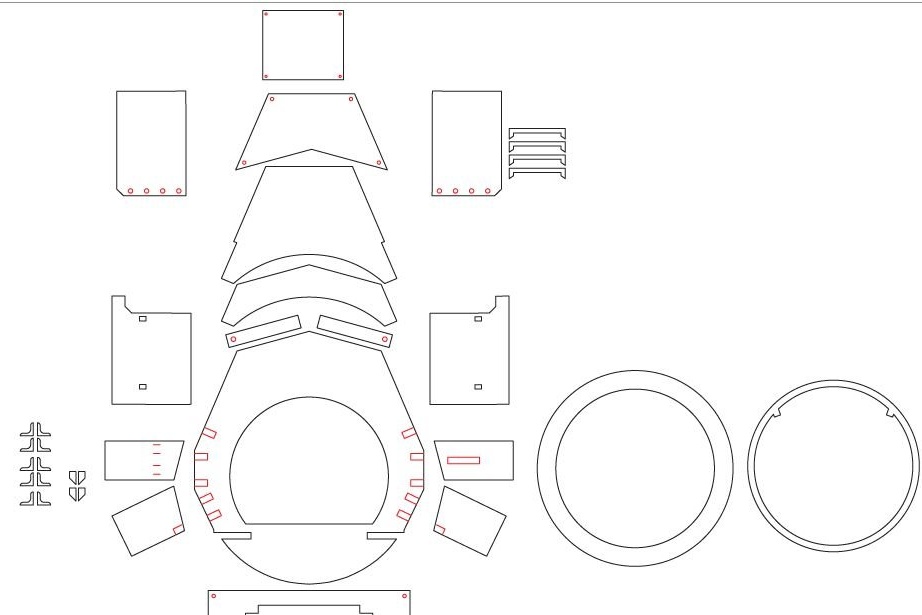
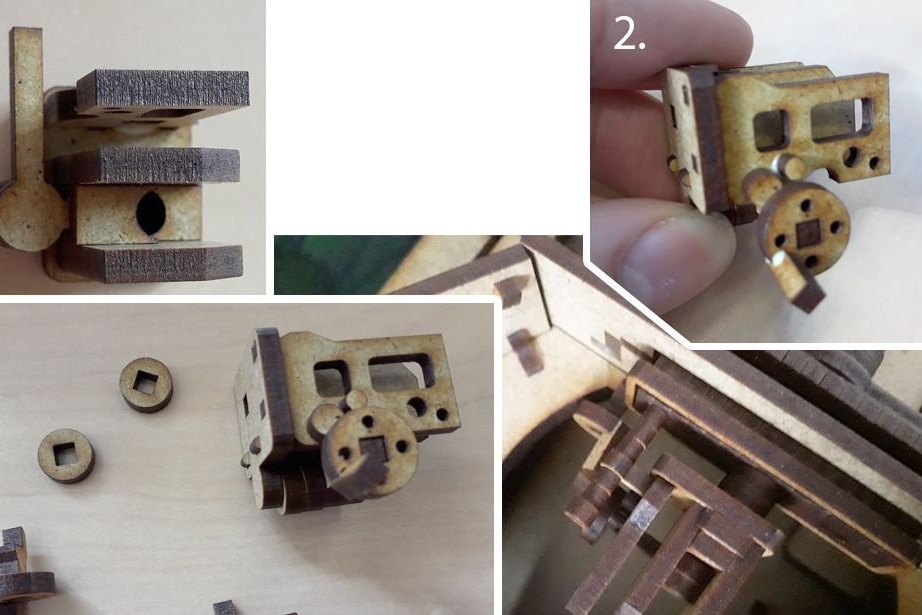
Krok tretí: Prípad
Začína montáž karosérie. Montuje chladič a chrbát.
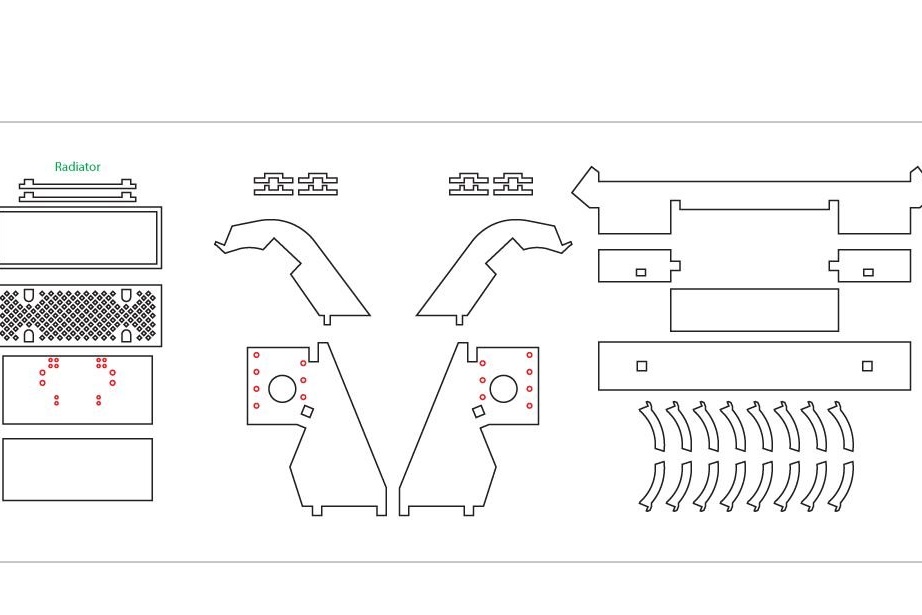
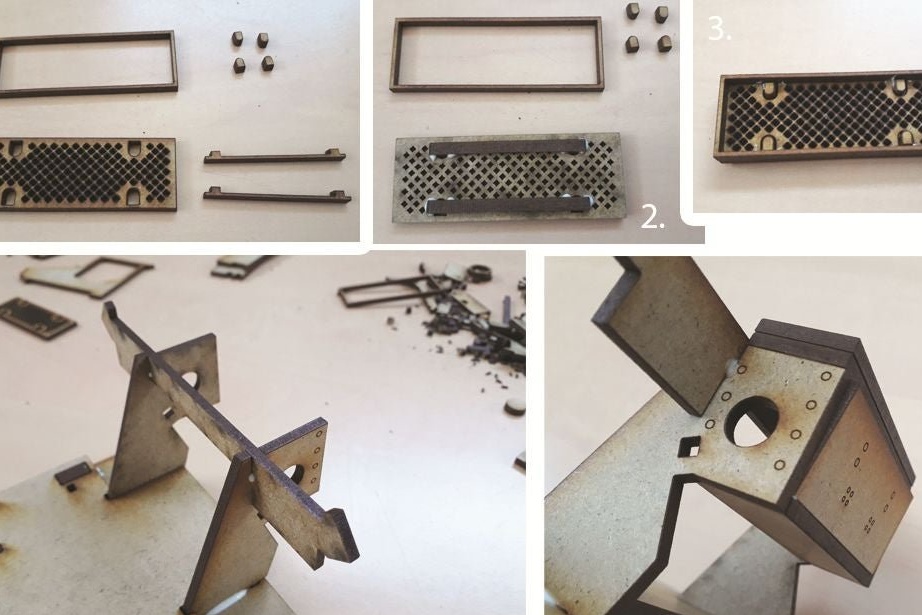
Zhromaždí predok.
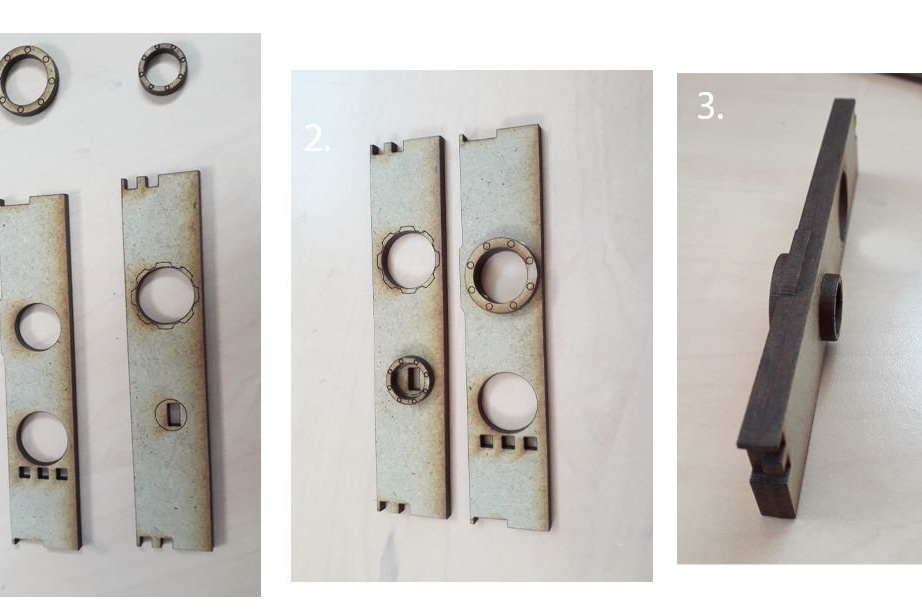
Po nasadení predného panciera je trup hotový. Ostatné časti budú naskrutkované alebo prilepené bez lepenia
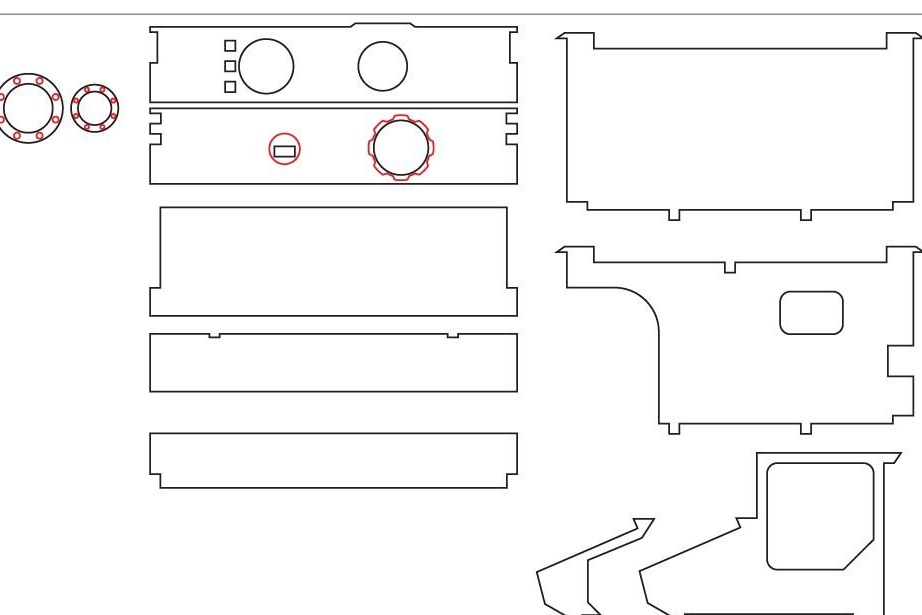
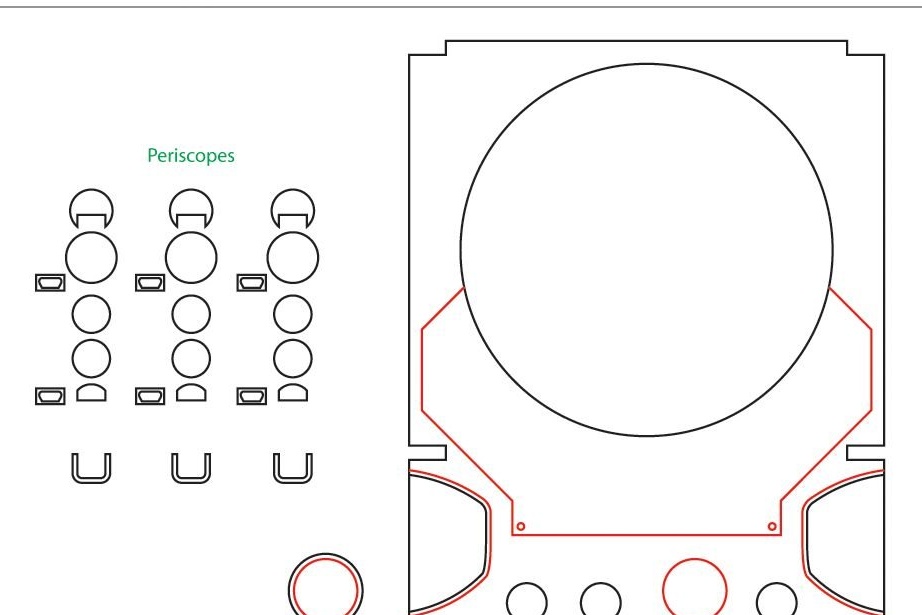
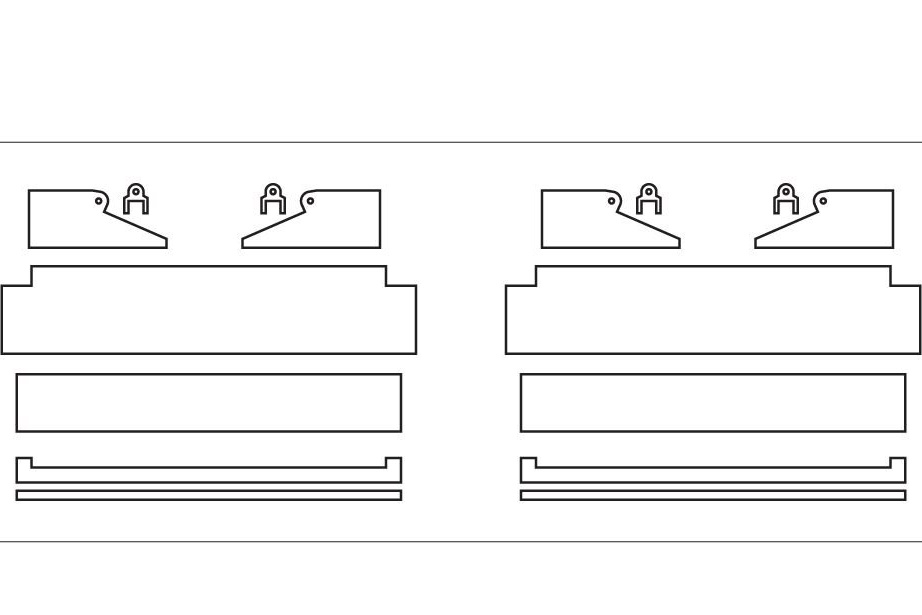
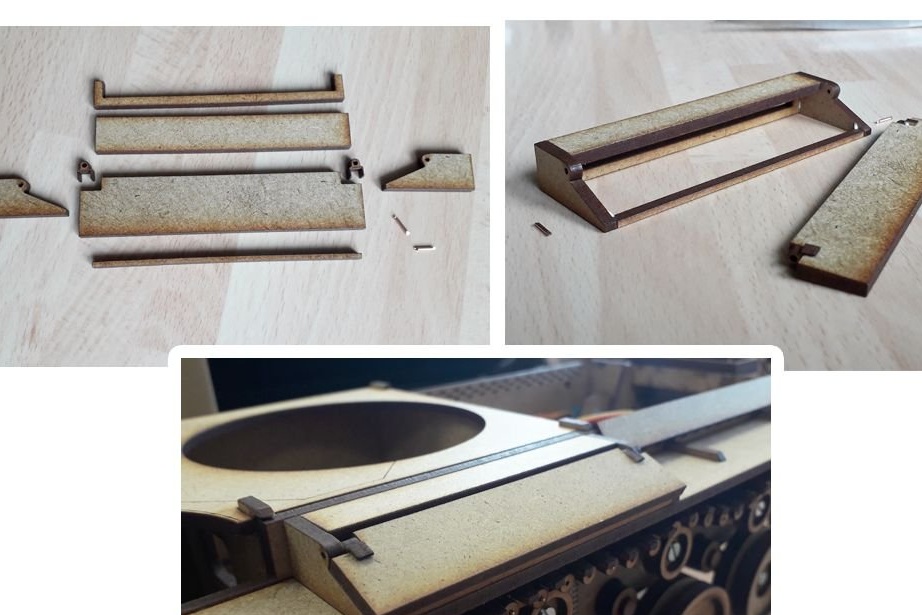
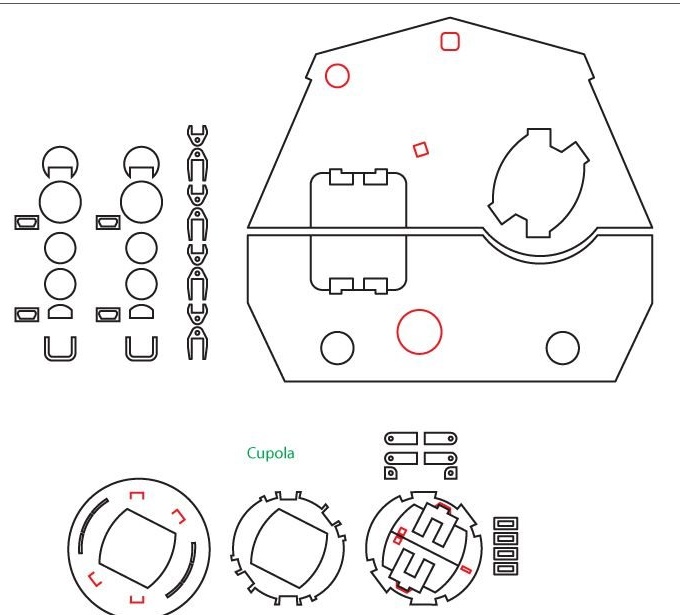
Krok 4: Strecha a periskop
Táto časť je odnímateľná časť. Toto sa vykonáva za účelom prístupu do vnútra. Páka na periskop sa inštaluje na konci strechy. Periskop je umiestnený na streche, ale nelepí sa naň.

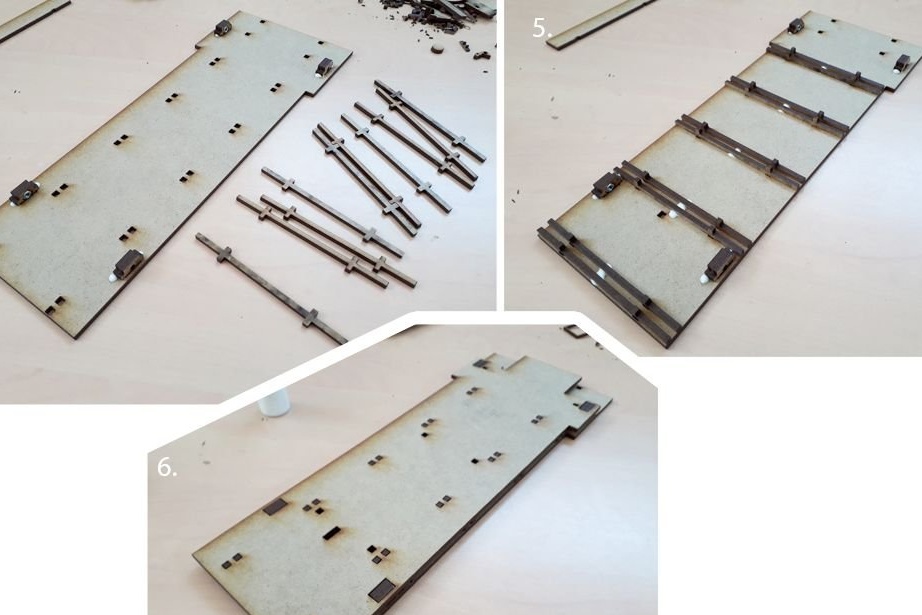
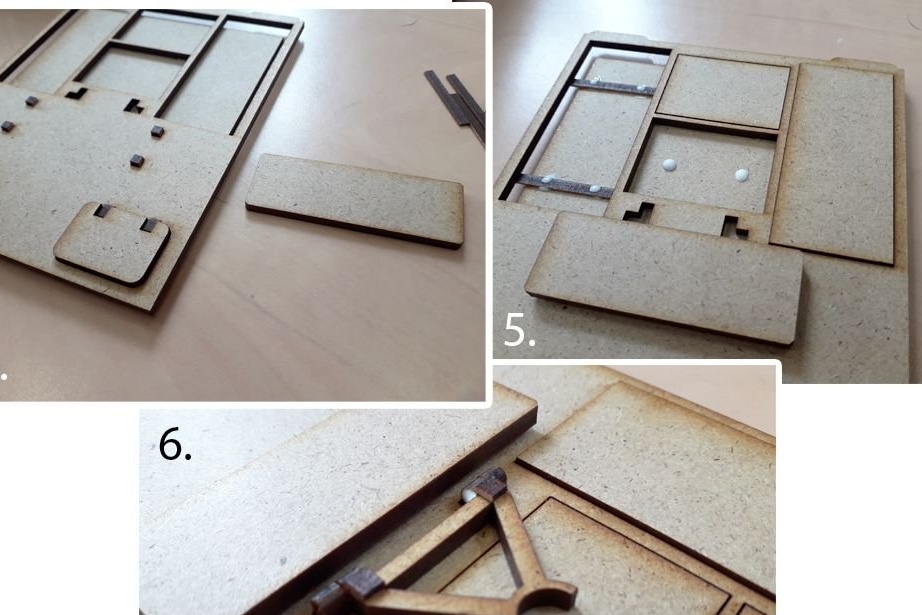
Krok 5: Bočný
Závesné ramená sú namontované na bočnej stene. Na dvojité dno sa priskrutkuje 15 mm skrutkami pomocou 4 matíc, ktoré boli pripevnené v prvom kroku.



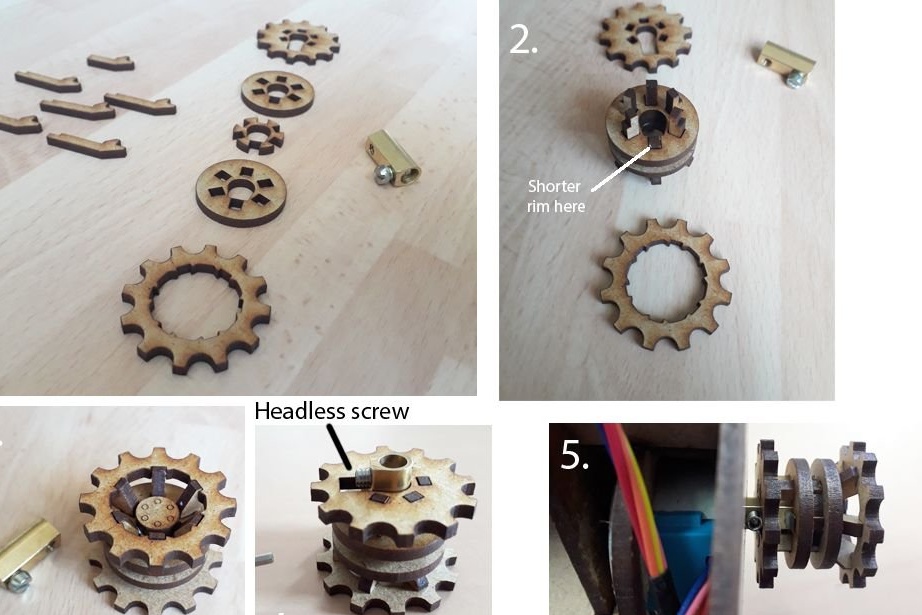
Krok 6: Pozastavenie
Zostavuje a inštaluje komponenty zavesenia. Všetky kroky sú podrobne vyjadrené na fotografiách. Na konce pružín naneste trochu lepidla na upevnenie. Vo vnútri pružín sa nachádzajú kúsky špáradiel. Tým sa zabráni vyskočeniu pružín.

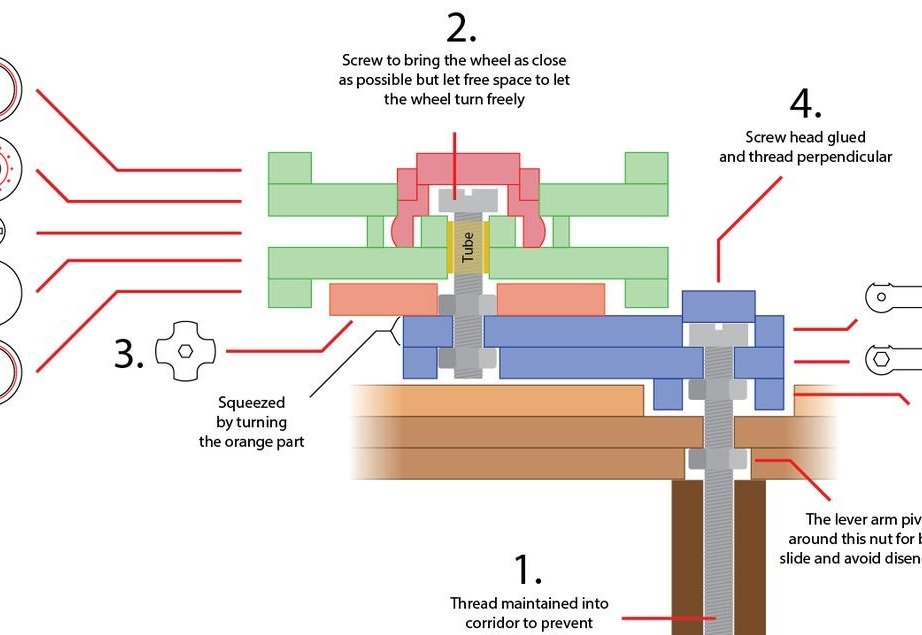
Montuje a inštaluje predné spodné koleso. Vo vnútri náboja kolesa je umiestnená mosadzná rúrka a 20 mm skrutka. Potom sa náboj uzavrie zátkou.
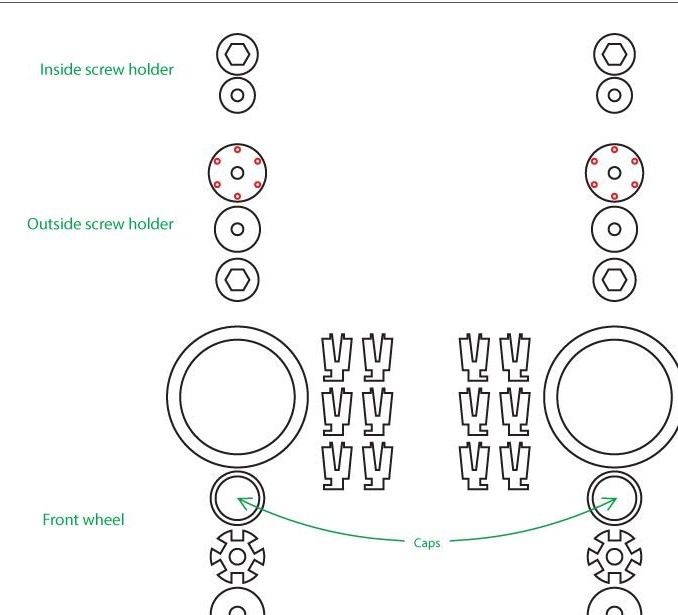

Zostavuje a inštaluje skôr koleso.


Zostavuje a inštaluje hnacie kolesá. Tieto kolesá budú pripojené k motorom inštalovaným v nádrži nádrže.
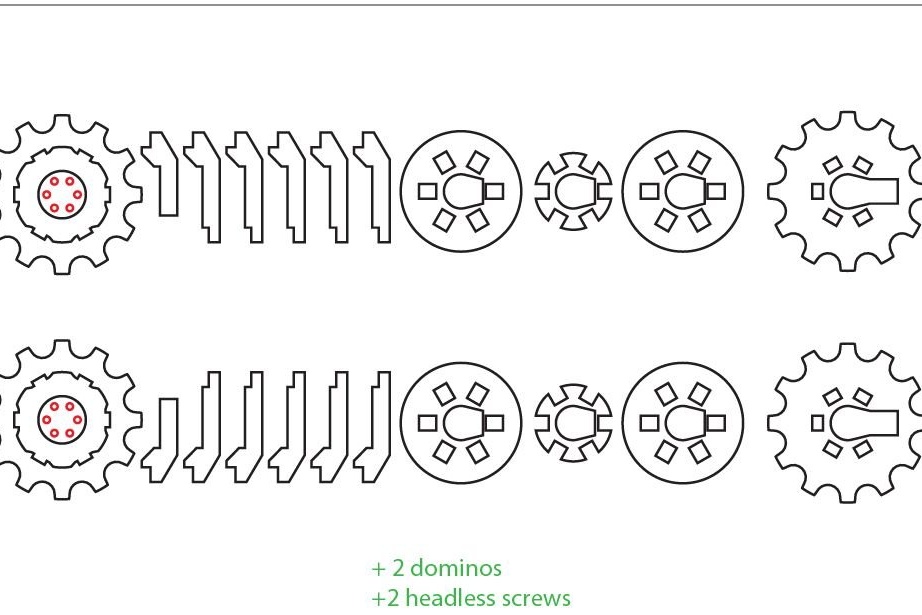
Inštaluje zátky na kolesá.

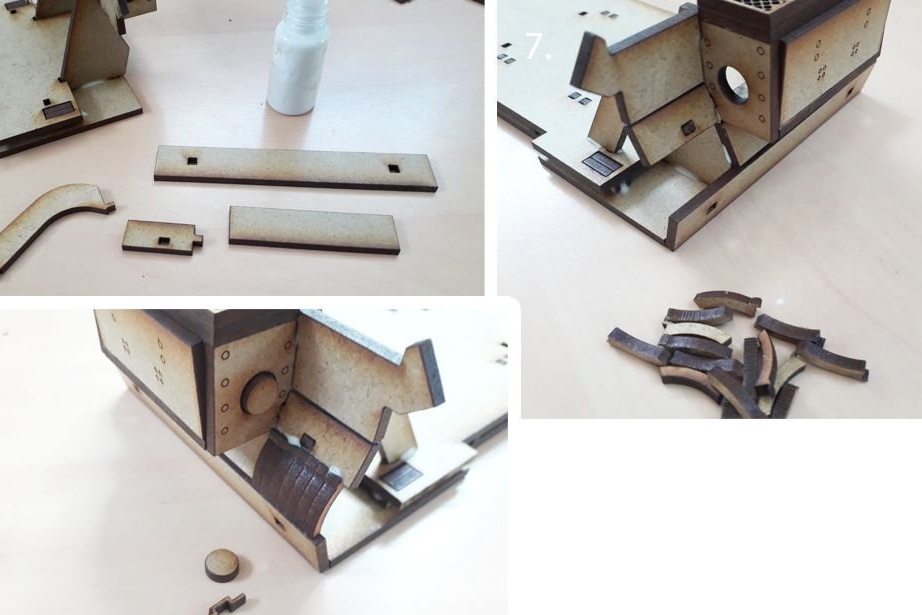
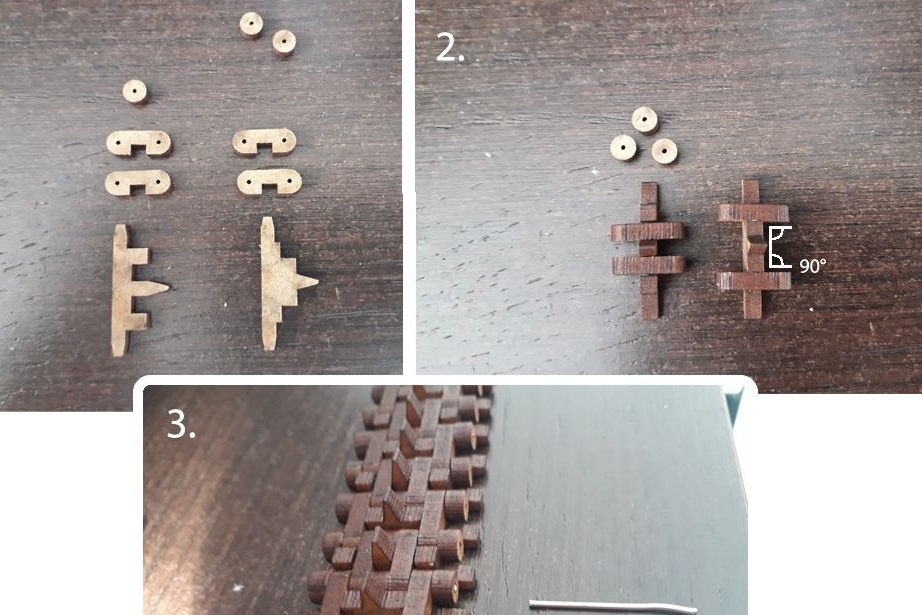
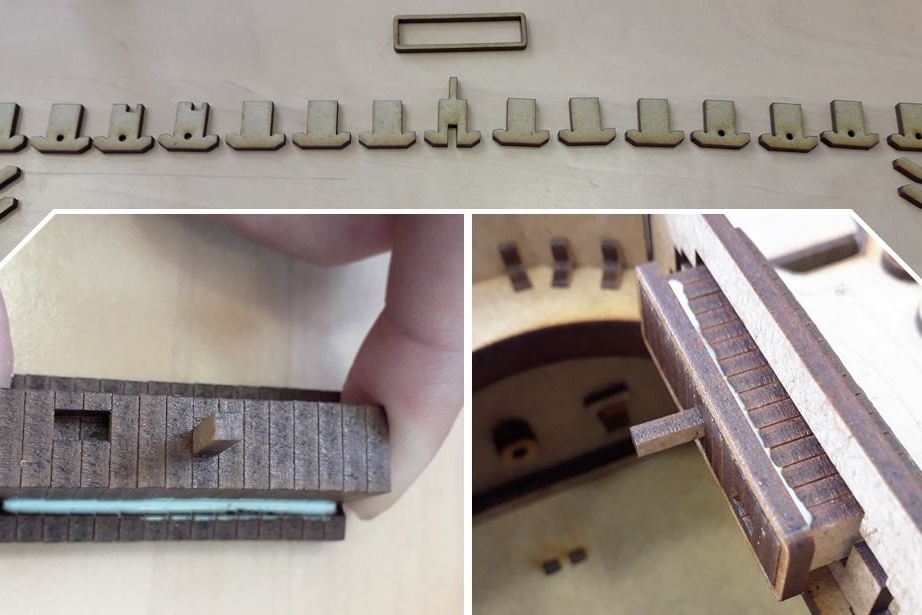
Krok 7: Sledovanie
Zbiera húsenice. Dráhy sú upevnené pomocou tenkého drôtu. Po stranách drôtu je pripevnená krytka.
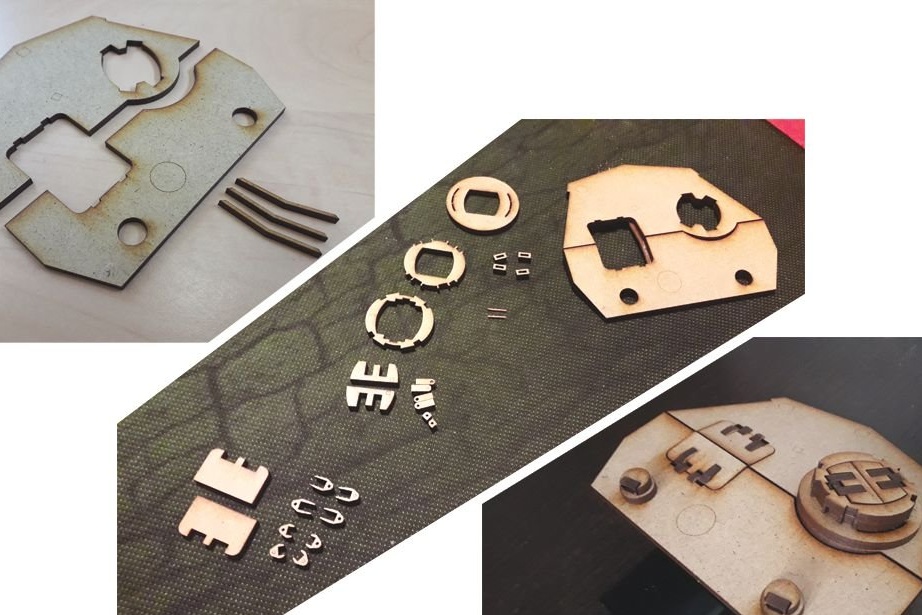
Krok 8: Ochrana pred nečistotami a zásuvka
Inštaluje štíty. Predná strana klapiek je pohyblivá a dá sa zdvihnúť.


Nastaví zásuvku. Ako slučky sú nainštalované kúsky drôtu.
Krok deväť: späť
Táto časť sa nachádza za vežou a bude pokrývať celý objekt elektronika.
Krok 10: Veža
Zhromažďuje vrchol veže a bočné steny.
Lepí držiak pištole.
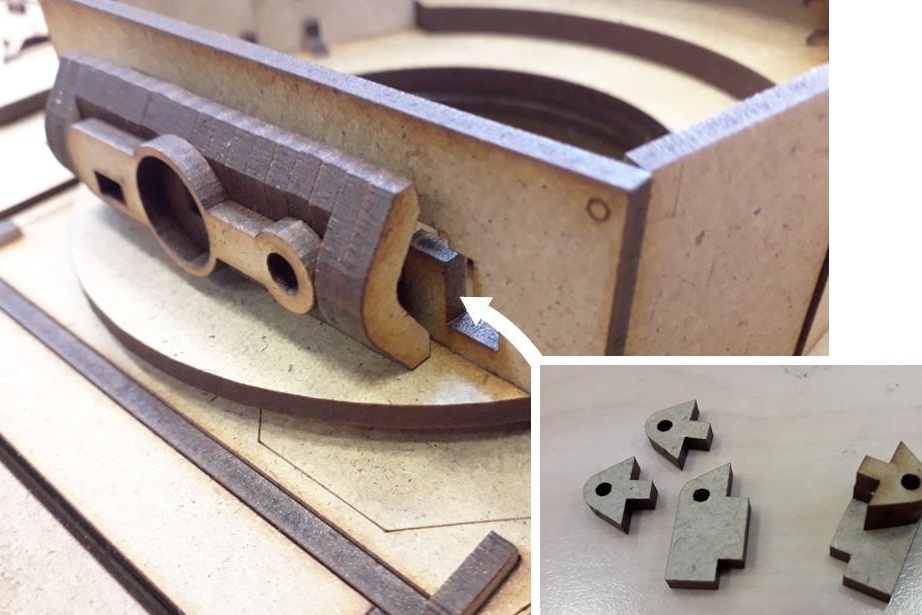
Nastavuje vnútorný mechanizmus montáže a pištole.

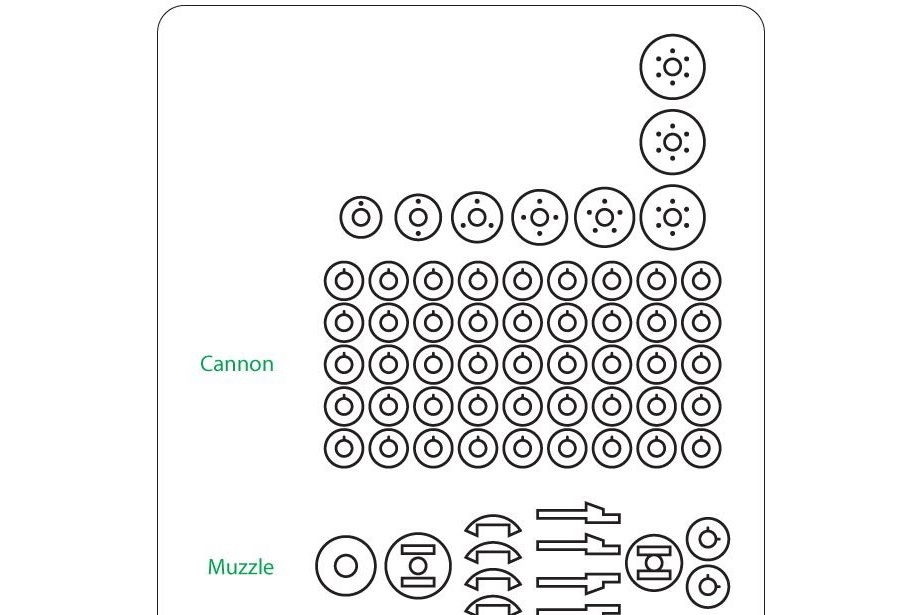
Krok jedenásť: pištoľ
Zbiera zbraň, hlavná zbraň je kovová tyč. Zvyšné detaily sú na ňom navlečené.

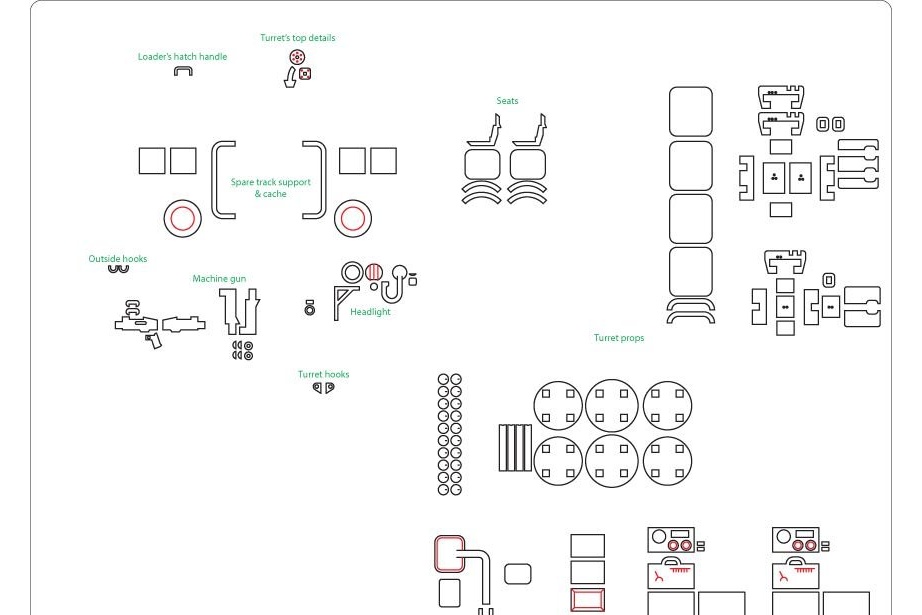
Krok dvanásť: Malé podrobnosti
Zaisťuje malé časti nádrže.
Vo vnútri je na ľavej strane sedadlo a guľomet mimo hlaveň guľometu.
Priamo na sedadle vodiča: sedadlo, ovládacie páky a pedále, strešné okno.
Vonku: háčiky, svetlomety, skrinky, strelivo, drôtené lano atď.
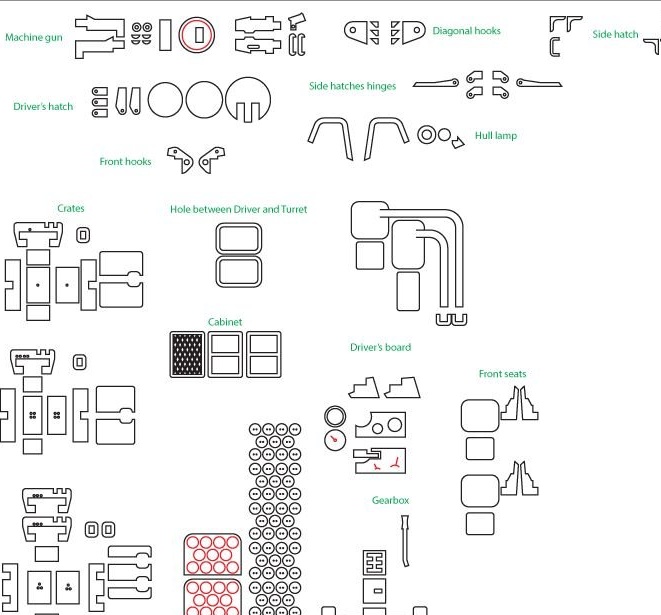
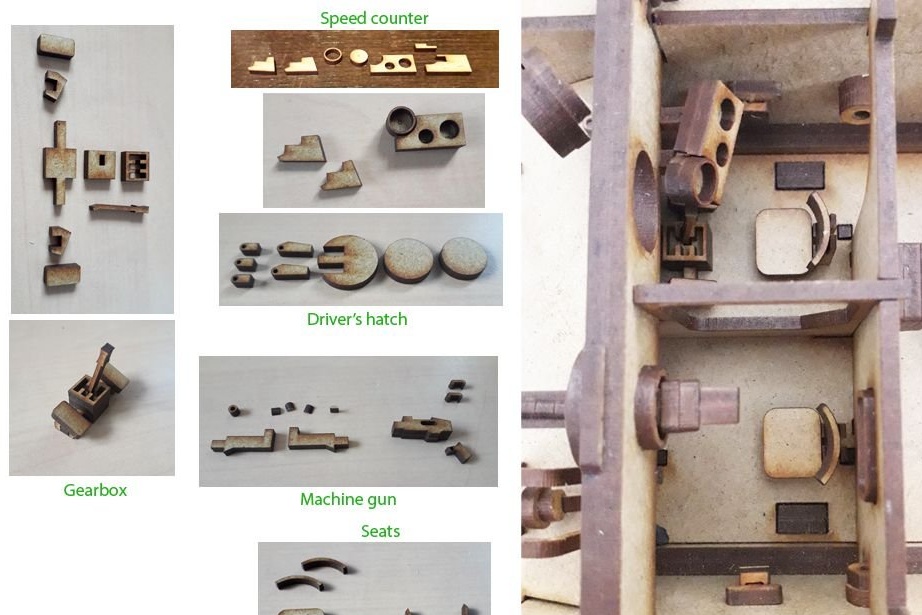

K veži je pripevnená nádrž pod vodou, vo veži je vysielačka.

Krok trinásť: Elektronika
Inštaluje motory. Vykonáva inštaláciu elektronickej časti podľa schémy.
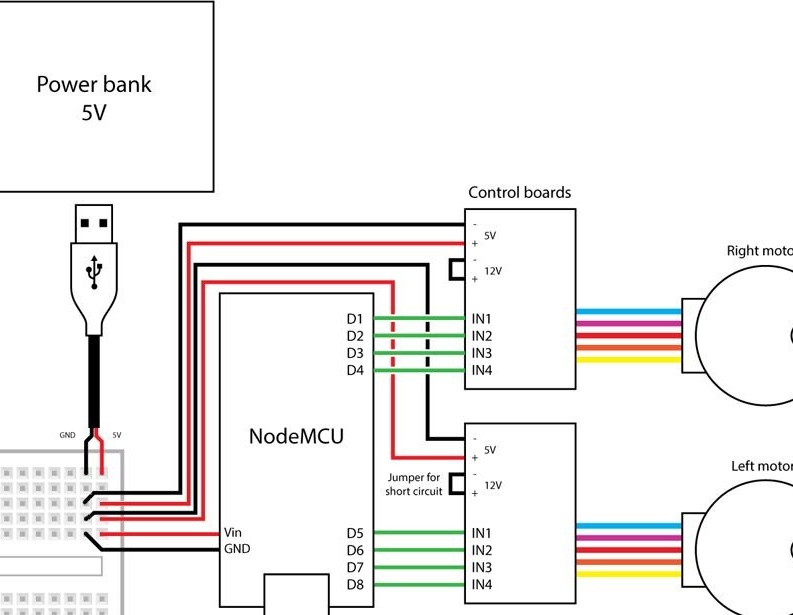

Pre bezdrôtové ovládanie som si vybral radič NodeMCU. Model je riadený prostredníctvom NodeMCU a aplikácie Blynk (k dispozícii pre Android / iOS). Táto aplikácia poskytuje plne prispôsobiteľné HUD na ovládanie z ľubovoľného Arduino alebo iOS telefón cez WiFi.
Po inštalácii aplikácie je preto potrebné najprv vytvoriť účet.
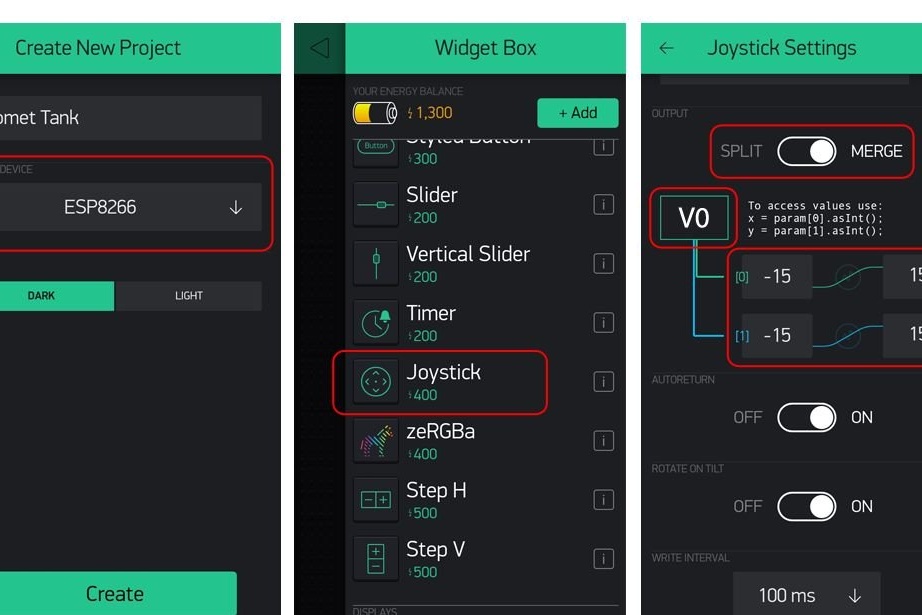
Vytvorte nový projekt a ako mikrokontrolér priraďte ESP8266 (čip NodeMCU) a nastavte režim WiFi.
Hneď ako prvýkrát uvidíte HUD, vytvorte pákový ovládač. Informácie joysticku odošlite virtuálnemu kolíku V0 uzla.
Po vytvorení pákového ovládača ho otvorte kliknutím na jeho nastavenie. V polohách X a Y nastavte rozsah od -15 do 15.
Nainštalujte knižnice.
Najprv si stiahnite knižnicu Stepper2 tu: https://github.com/udivankin/Stepper2
Táto knižnica je dobrou voľbou pre lacné krokové motory, ako napríklad ten, ktorý používal pán. Lepšie riadi fázy motora a poskytuje lepší krútiaci moment. Po stiahnutí súboru .zip ho nainštalujte zo softvéru Arduino: Skica> Zahrnúť knižnicu> Pridať knižnicu .ZIP ... a vyberte ju.
Ak ste nikdy predtým NodeMCU nikdy nezablikali, potrebujete počítač, aby ste ju rozpoznali. Arduino IDE má správcu dosky, na ktorom sú nainštalované správne ovládače.
Skopírujte nasledujúci riadok:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonOtvorte nastavenia a prilepte ich do adries URL. Uložte nastavenia a prejdite na správcu radiča v ponuke Nástroje> Doska> Správca dosiek. ESP8266 musí byť na konci zoznamu. Sprievodca si vybral verziu 2.5.0 s IDE v 1.8.9.
Potrebujete tiež knižnicu Blynk, ktorú nájdete na stránke Skica> Zahrnúť knižnicu> Spravovať knižnice ... a potom vyhľadajte Blynk vo vyhľadávacom poli.
Prejdite na nastavenia projektu a pošlite token na svoju adresu, čo je veľký reťazec, ktorý umožňuje vášmu telefónu rozpoznať NodeMCU, keď je zapnutý. Skopírujte token z nedávno prijatej pošty a vložte ho do poľa Autor.
Teraz môžete nainštalovať firmvér.
Comet.ino
Všetko je pripravené, teraz si svoju prácu môžete užiť.