
Materiály a náradie:
- mikrokontrolér Arduino (v tomto domáci produkt platí Arduino Uno Rev 3);
- dve será z Parallaxu;
- joystick (tiež z Parallaxu);
- doska plošných spojov) malá);
- konektory na pripojenie;
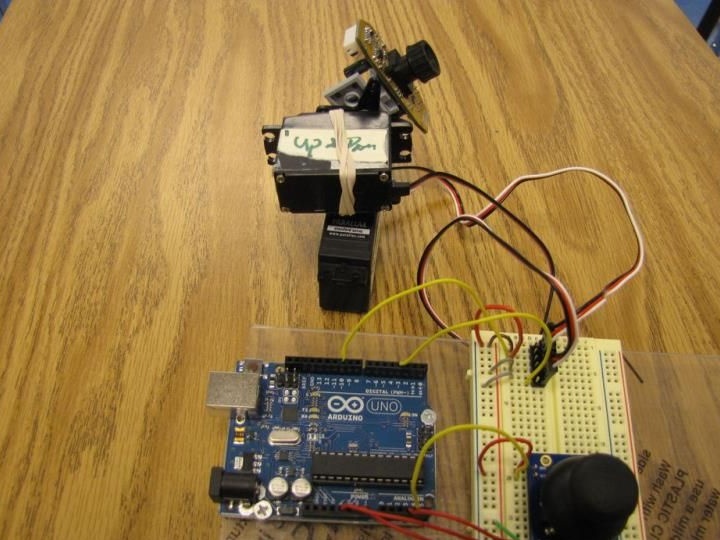
- Zariadenie na sledovanie pohybu servomotorov (používa sa zlomená webová kamera a kocky lego).
Proces montáže v domácnosti:
Prvý krok. Pripojujeme servomotory
Proces domácej montáže začína spojením servomotorov. Na zostavenie predbežného usporiadania sa používa doska plošných spojov. Potom bude možné vytvoriť samostatný štít. Na obrázku vidíte, ako presne je všetko spojené.
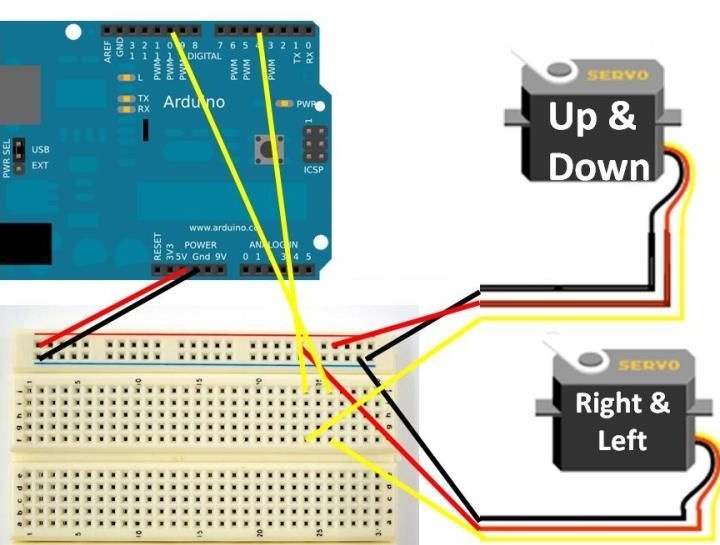
Červený kábel je napájací, pripája sa k 5V kolíku na radiči Arduino.
Čierny vodič je mínus (uzemnenie), pripája sa na výstup Arduino s názvom GND.
Žltý kábel z pravého a ľavého servomotora musí byť pripojený ku kolíku 11. U niektorých modelov môže byť biely.
Podobný žltý kábel smerom hore a dole musí byť pripojený ku kolíku 4. Na niektorých modeloch motora môže byť tiež biely.
Je dôležité pamätať na to, že signálové konektory používané na riadenie motora pochádzajú z výstupov PWM.
Krok dva Pripojte joystick
Ako je joystick pripojený, môžete vidieť na obrázku. Spočiatku sa môže schéma zdať pomerne komplikovaná, ale v skutočnosti tu nie je nič komplikované. Rovnako ako v prípade motorov sa tu používa elektrická doska.
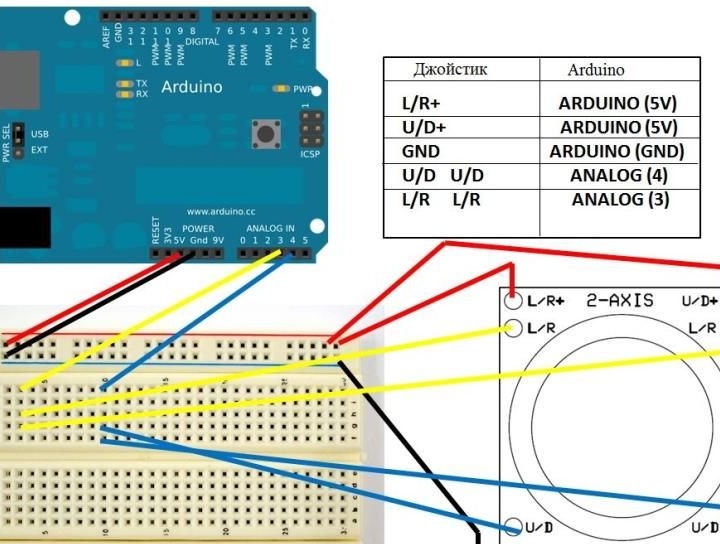
1. Na module joysticku nájdete výstupy U / R + a L / R +. Prostredníctvom týchto výstupov je pripojené napájanie. Preto musíte na Arduino pripájať + 5 V napätie z príslušného kolíka.
2. Pod joystickom sa nachádzajú aj dva konektory nazývané L / R a dva konektory U / D. Musia byť pripojené k analógovým výstupom A3 a A4.
3. Na záver musí byť zem na pákovom ovládači spojená so zemou na Arduino.
Po montáži musí byť spojenie opäť skontrolované. Vo väčšine prípadov sa vyskytnú problémy. Platí to najmä vtedy, keď sa používa doska plošných spojov a existuje veľa spojení.
Krok triSkica pre Arduino
Kód je veľmi jednoduchý a obsahuje podrobné pripomienky. Vyššie uvedený kód sa musí skopírovať do Arduino IDE. Po načítaní kódu by sa motory nemali pohybovať. Pohybovať by sa malo iba po stlačení tlačidla na joysticku.
Problémy, ktoré môžu vzniknúť a ako ich riešiť
1. Ak sa motory nezapnú, dvakrát skontrolujte pripojenie. Výstupy PWM sa používajú na pripojenie motorov a analógové výstupy sa používajú na pripojenie joystickov.
2. Stáva sa, že ihneď po načítaní kódu začnú motory vibrovať. To sa stane, ak nesprávne zapojíte kolíky U / D + L / R +. Pripojenie je potrebné starostlivo skontrolovať. Aby sa doska pri skúške nespálila, musí sa odpojiť od počítača.
3. Ak je všetko skontrolované, ale motory stále nechcú pracovať, môžete skúsiť znovu pripojiť joystick. Musí sa vybrať z dosky s plošnými spojmi a potom s určitým úsilím nainštalovať späť. Konektory joysticku by mali ísť do usporiadania.
Ak sa všetko ukázalo, teraz môžete pomocou joysticku začať vytvárať akékoľvek domáce výrobky pomocou ovládania. Napríklad môžete vyrobiť robota, ktorý je možné ovládať pomocou pákového ovládača a oveľa viac.