


Časť môjho návrhu som prevzal z montážnych pokynov pre Lego Technic 42029. Zvyšok je moja improvizácia. Potrebujeme teda:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (lepšie ako Populus, ale môžete mať aj čínskeho náprotivku)
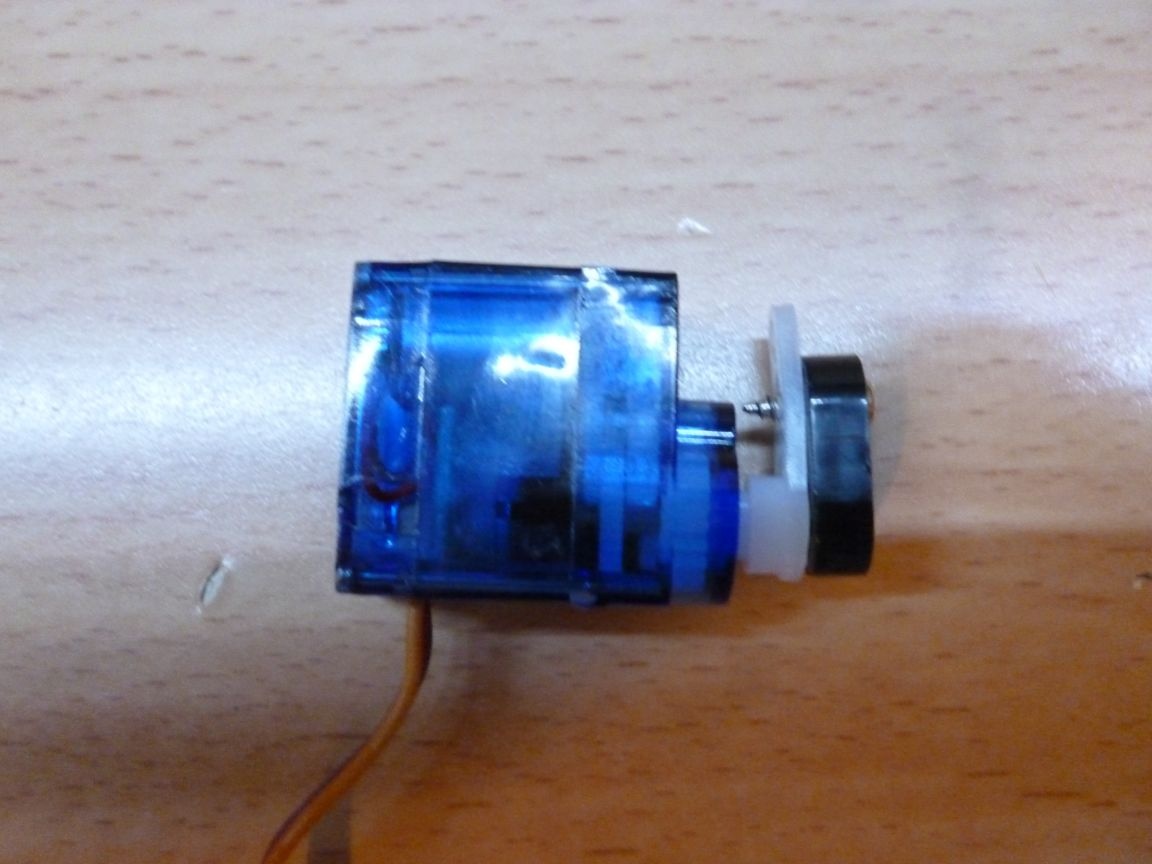
- 2 servopohony SG-90
- IR prijímač
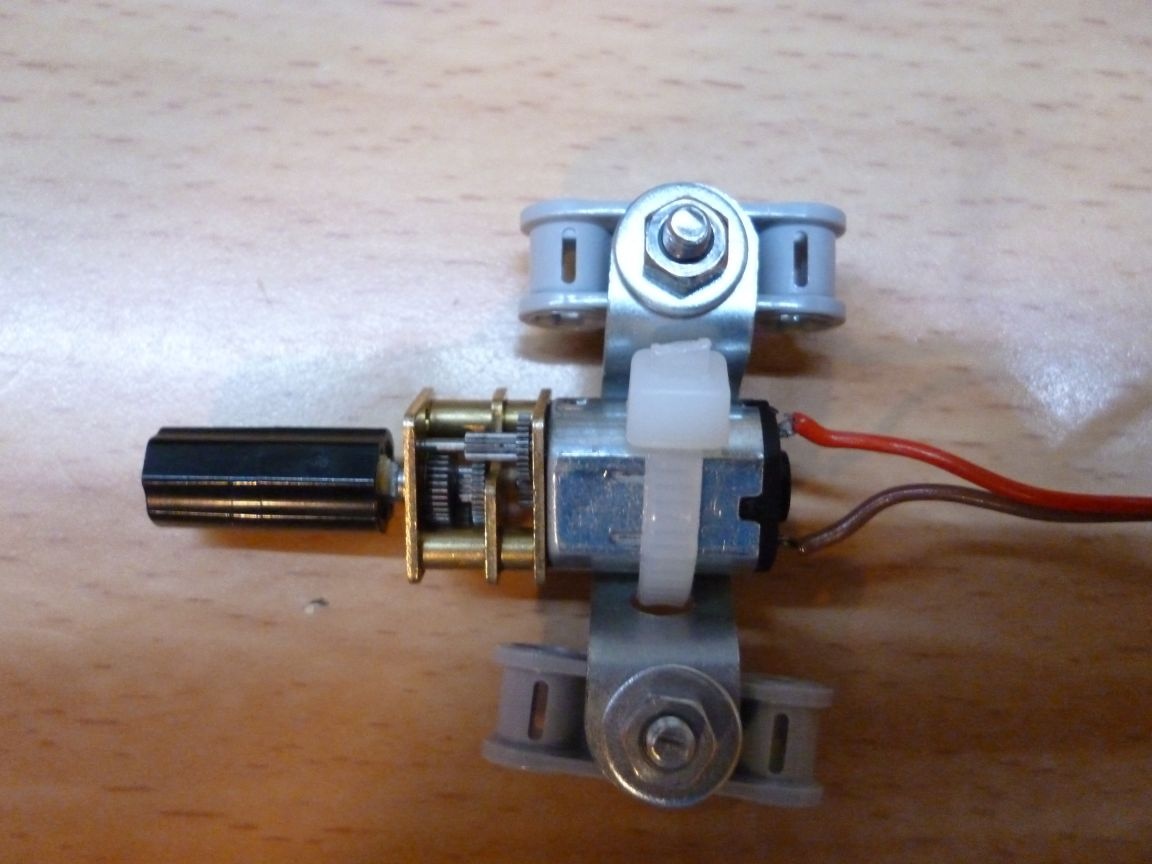
- Motorová prevodovka 200 ot./min
- 2 LED
- 2 odpory 150 ohmov
- Kondenzátor 10 V 1000uF
- 2 jednoradové hrebene PLS-40
- 2 konektory PBS-20
- Induktor 68mkGn
- 6 batérií NI-Mn 1,2 V 1000 mA
- Dvojitý kolíkový vodič na vodiče
- Homutik
- Drôty rôznych farieb
- spájka
- Rosin
- kancelársky nôž
- spájkovačka
- Skrutky 3x40 a matice a podložky pre ne
- Skrutky 3x60
- Batérie Ni-Mn 1,2 V 1000 mA 6ks.
Krok 1 zozbierame zadnú časť suspenzie.
Najprv musíte zložiť zadnú časť zavesenia podľa pokynov v Lego 42029 časť 1, počnúc od 3 strán a 8 vrátane. Ďalej pridajte niekoľko detailov, aby ste mohli nainštalovať motor a prevodovku.
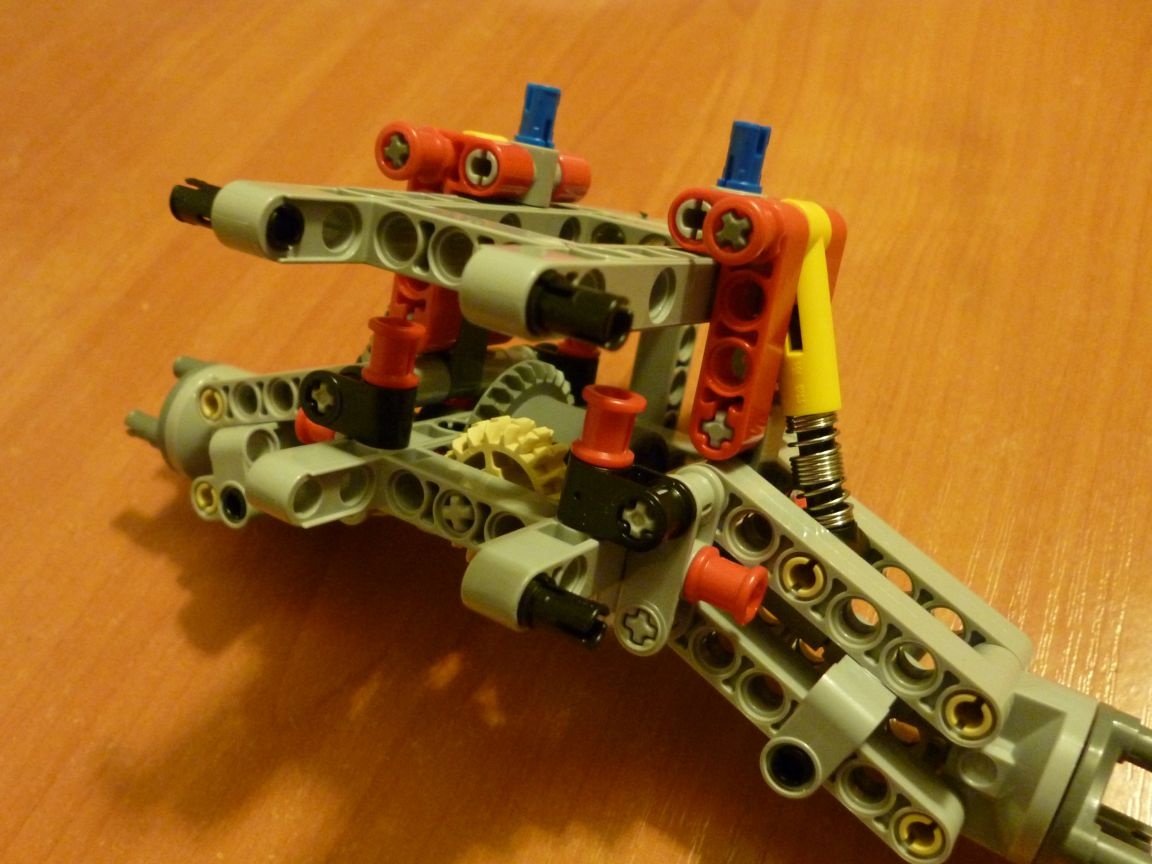
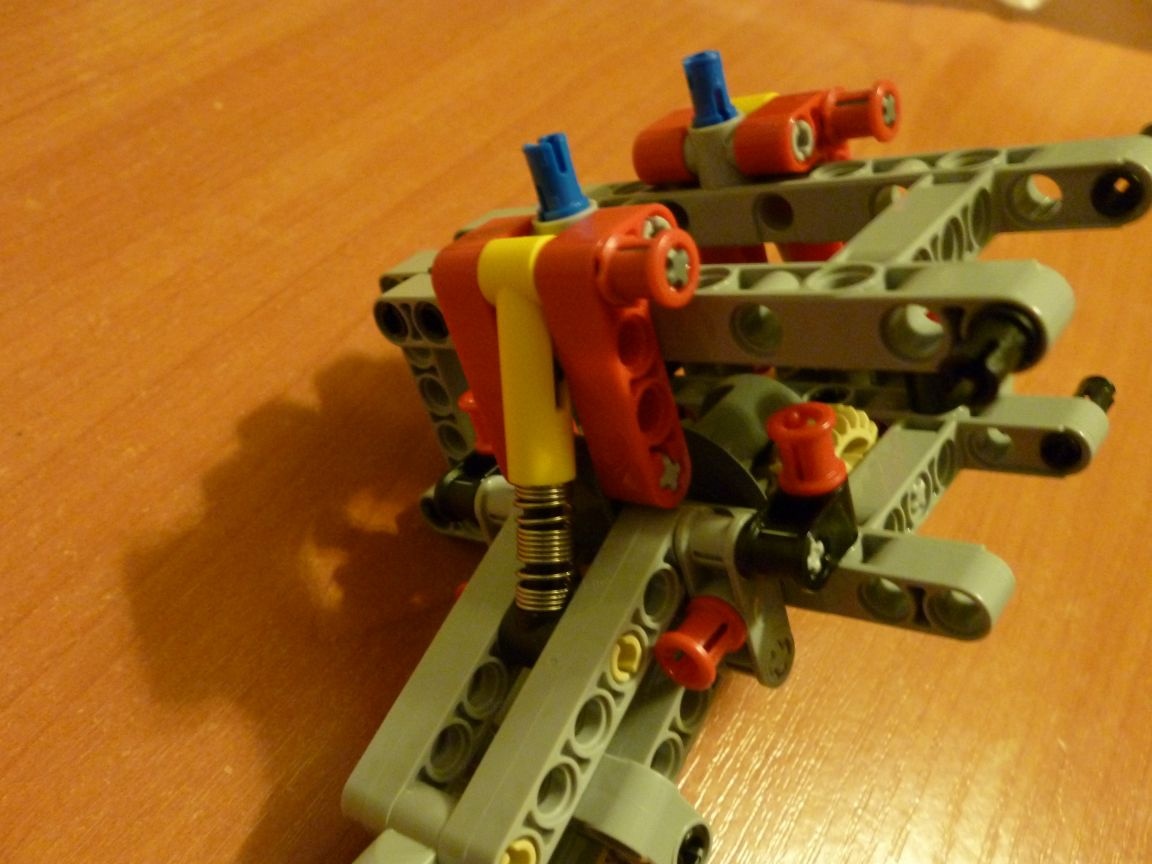

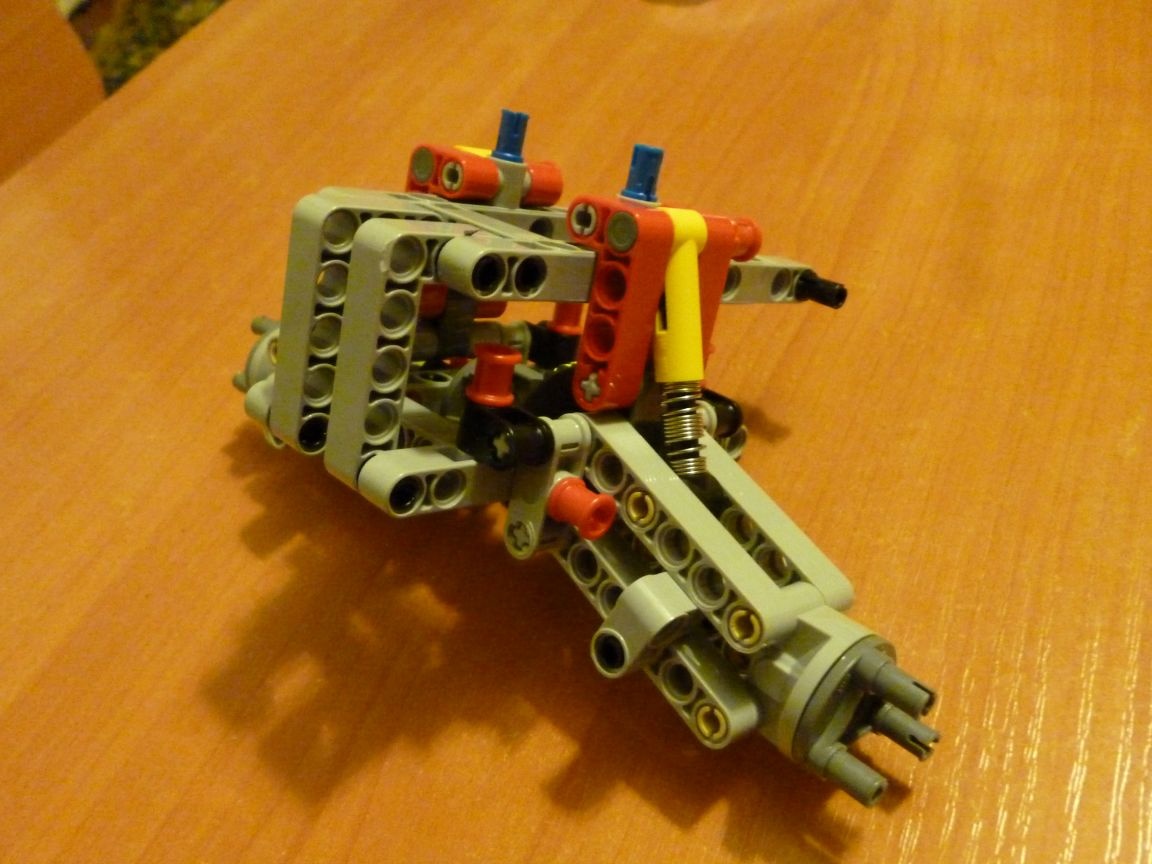
Krok 2 predné zavesenie.
Zostavujeme prednú časť zavesenia podľa pokynov Lego 42029 časť 1, od strany 21 do 23. Z druhej časti pokynov Lego odoberáme lichobežník zo strán 6 až 11. Naviják montujeme z druhej časti strany 14 - 22. Druhá časť nárazníka je 34 - 36 strán.
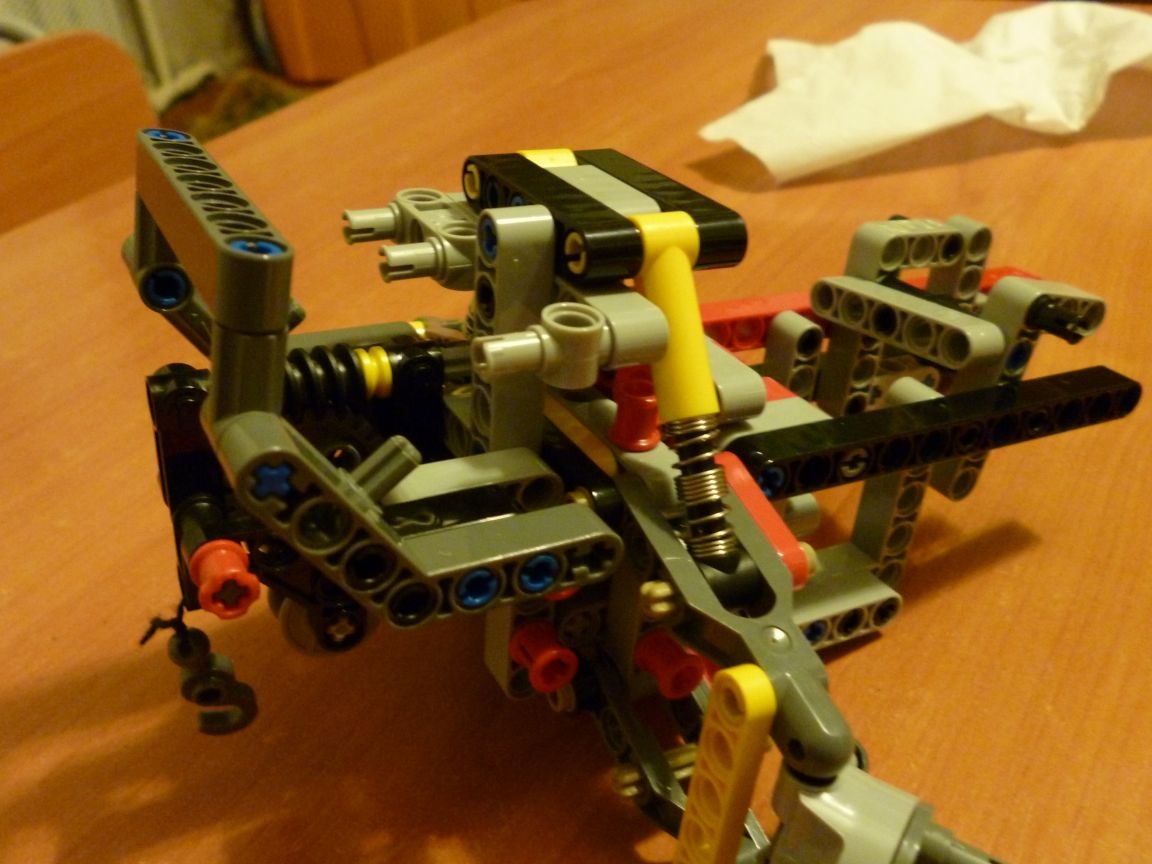
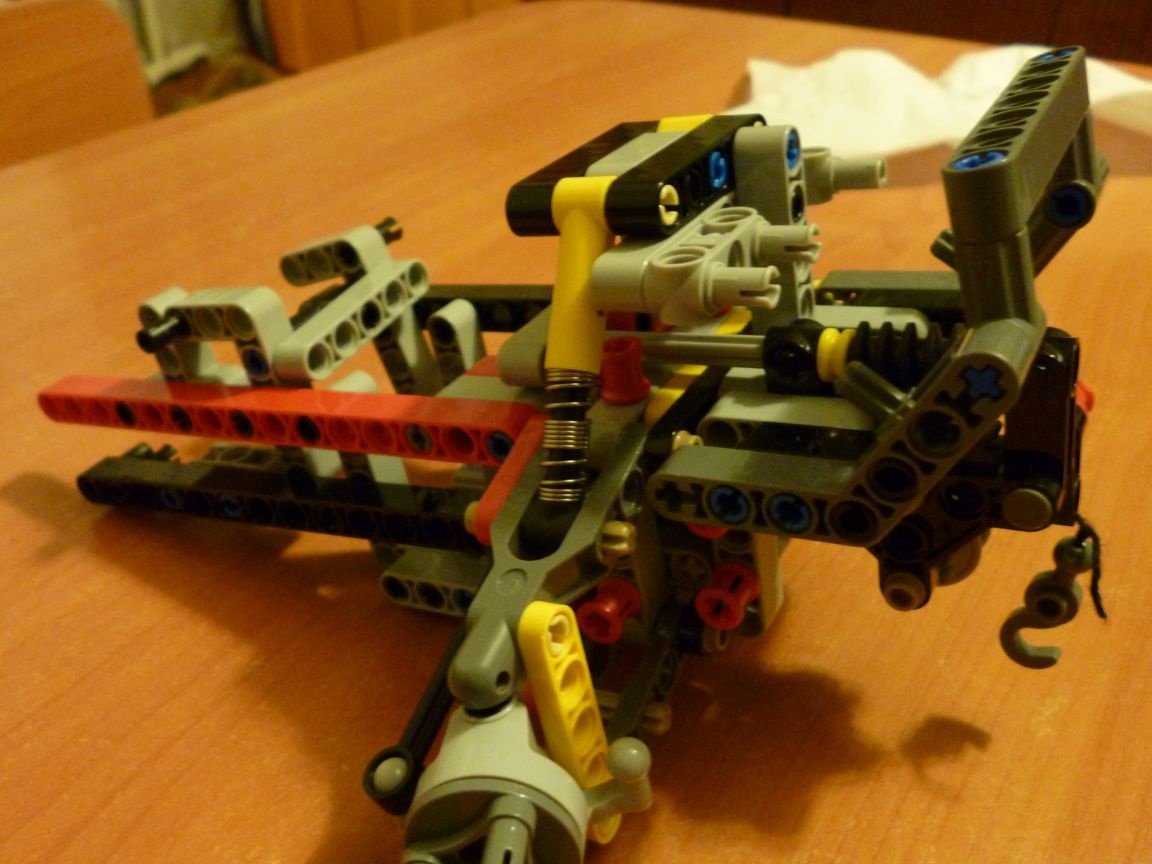
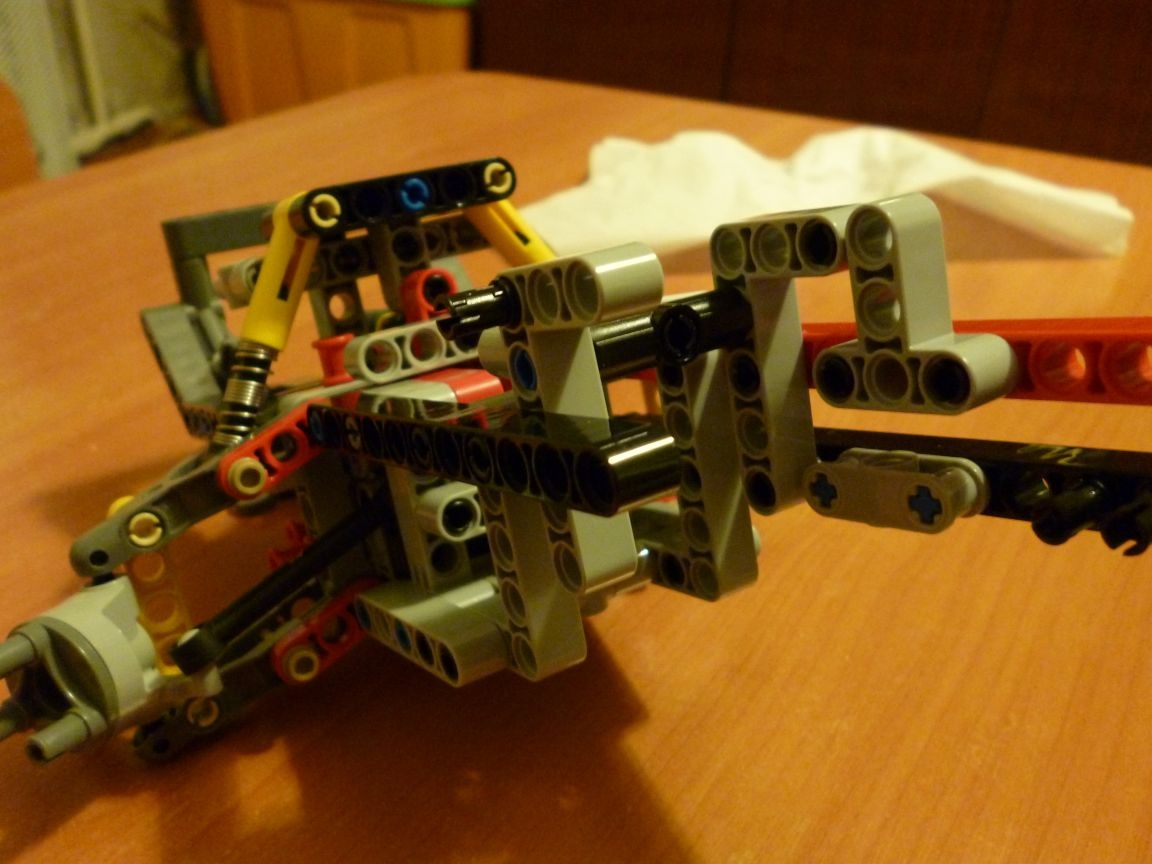
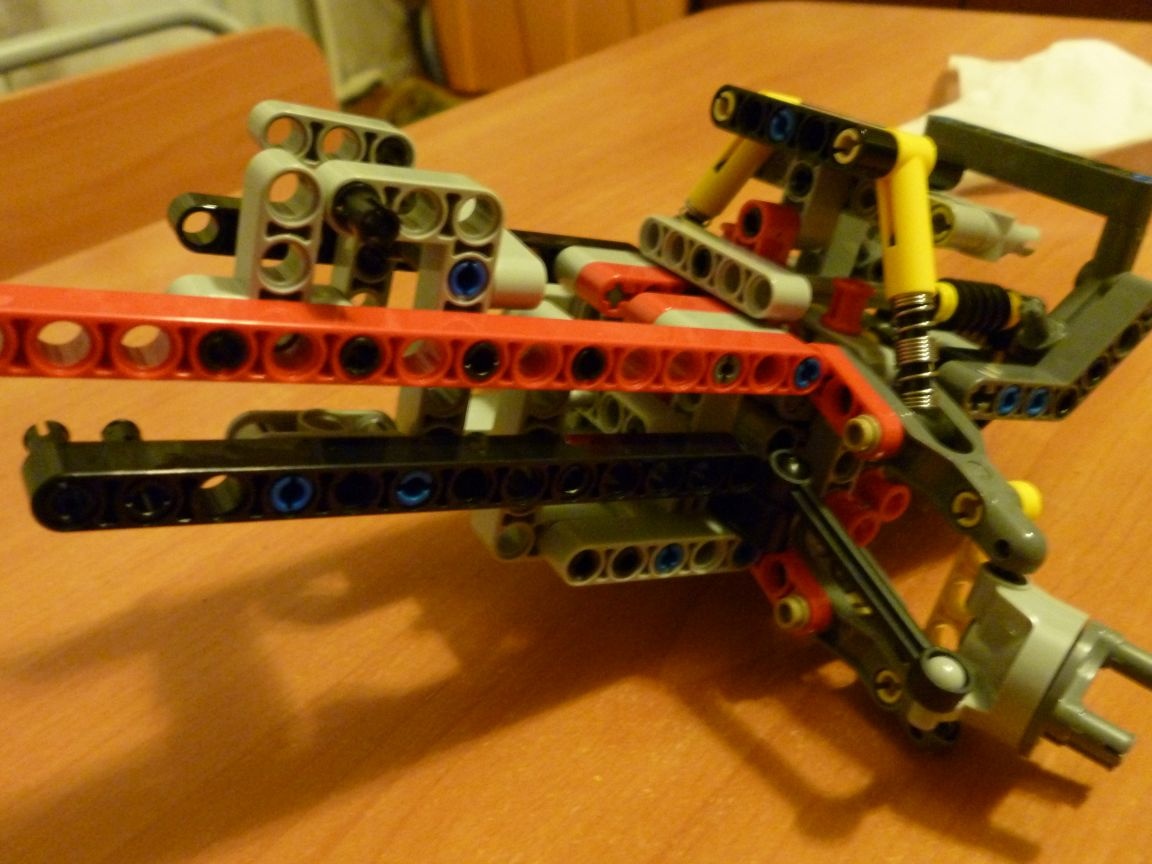

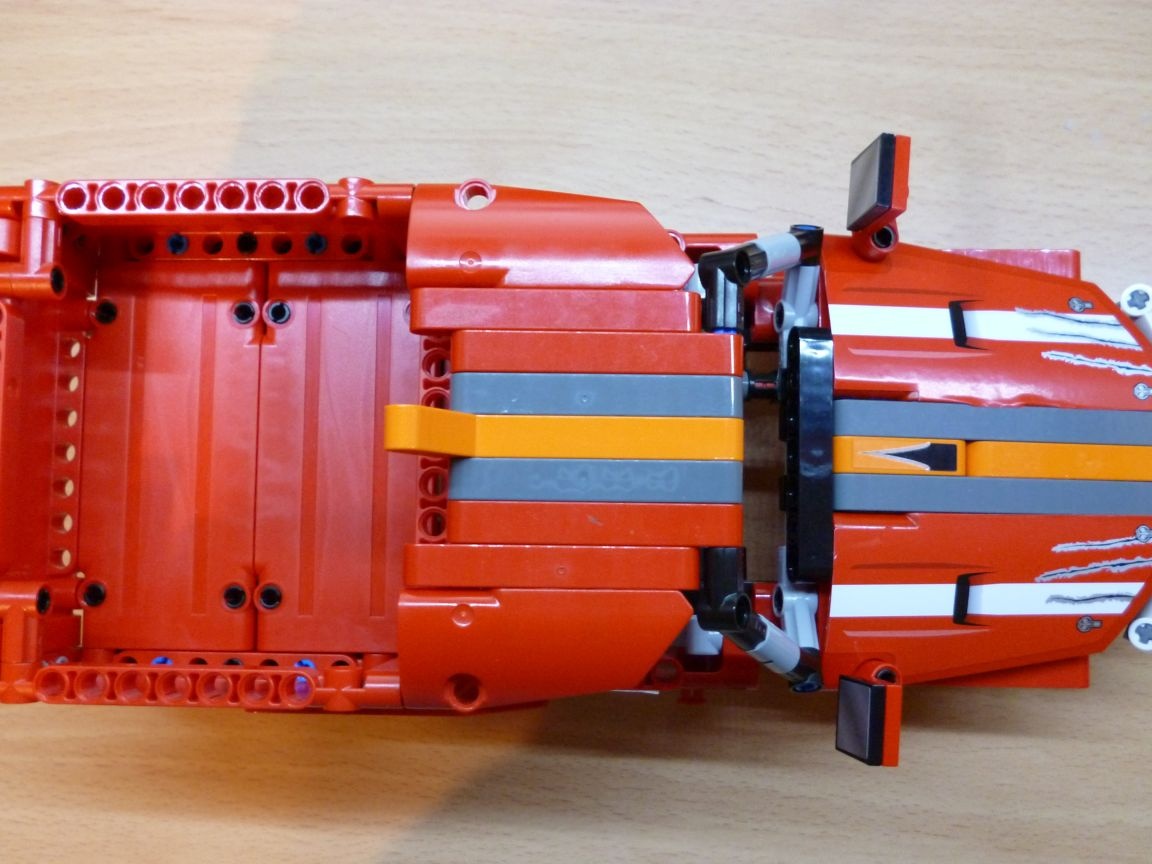
Krok 3 namontujte podvozok.
Spojíme obe časti, ako je znázornené na fotografii:

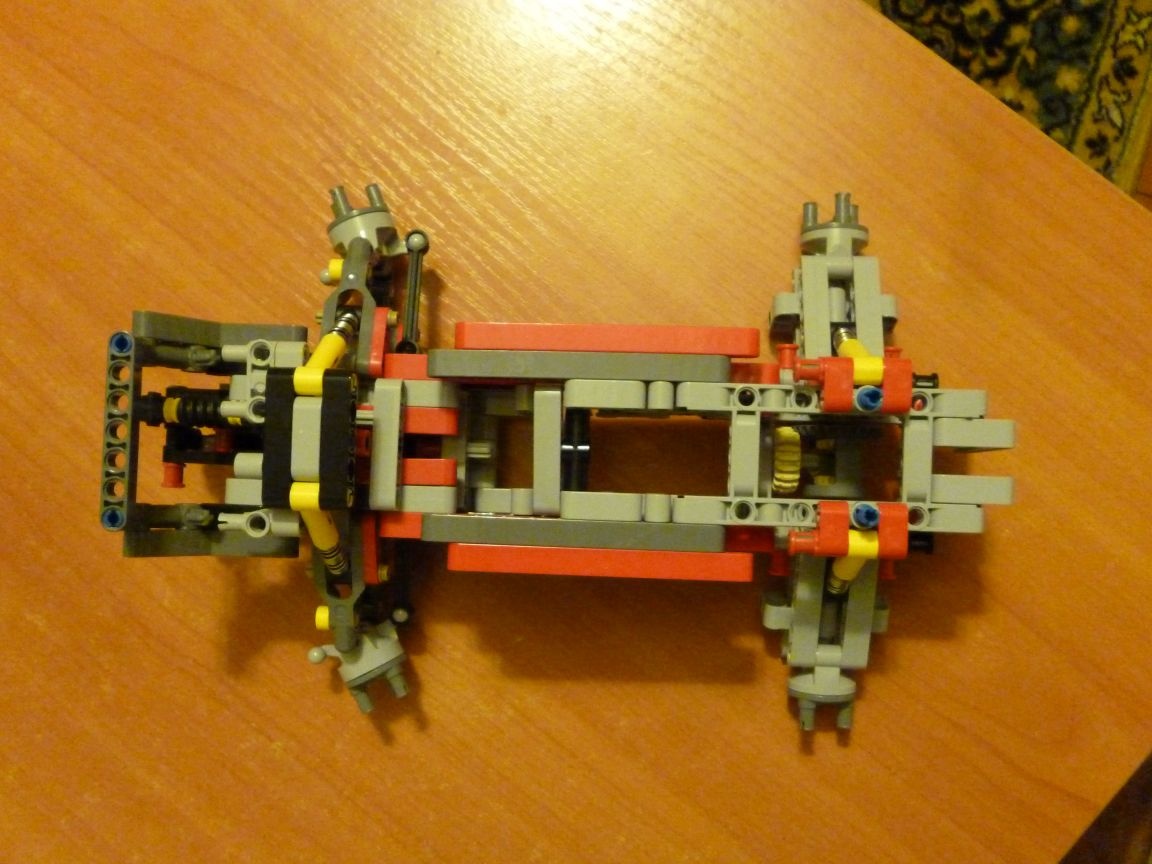
Problém prepojenia prevodového motora s časťami projektanta som vyriešil nasledovne: Položil som spojovacie puzdro na os prevodového motora a vložil som šrot zodpovedajúci za upevnenie. Na montáž prevodového motora používame kovový plast od dizajnéra železa a svorku.
Ukázalo sa, že:
Montáž na podvozok:
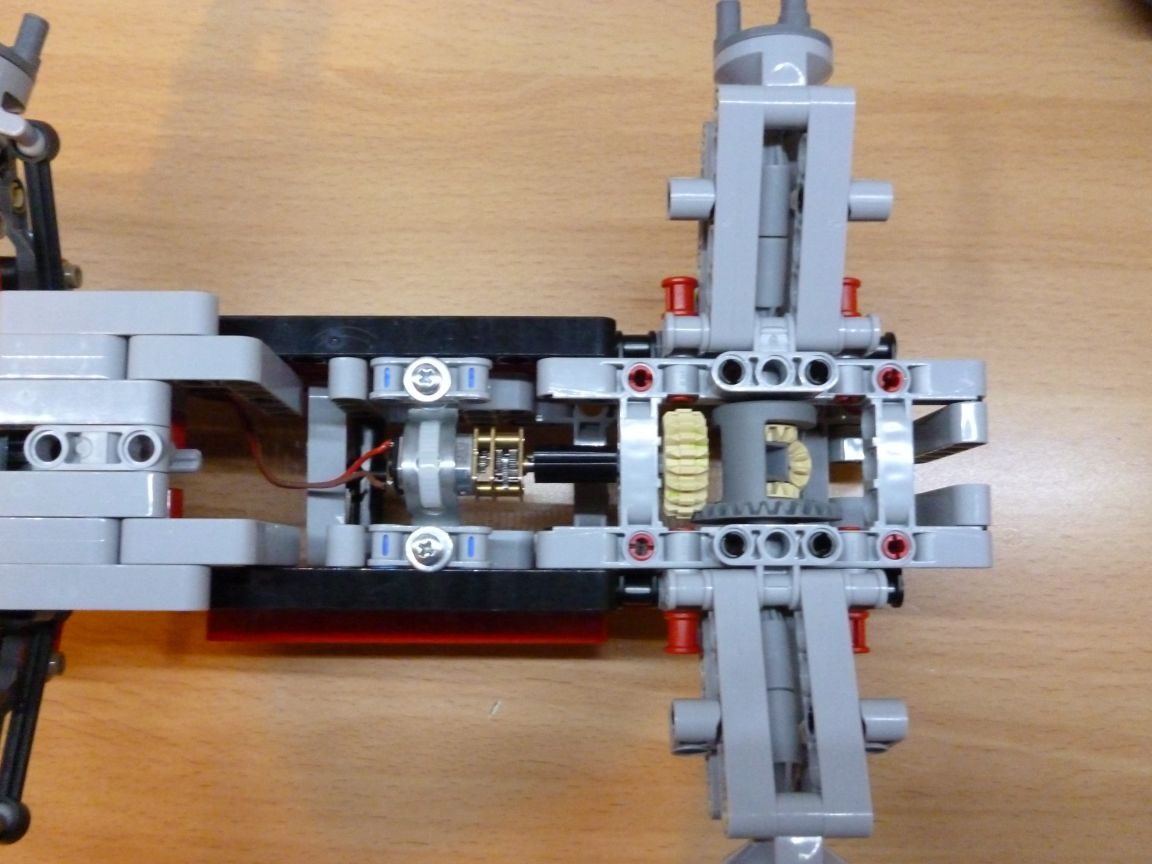
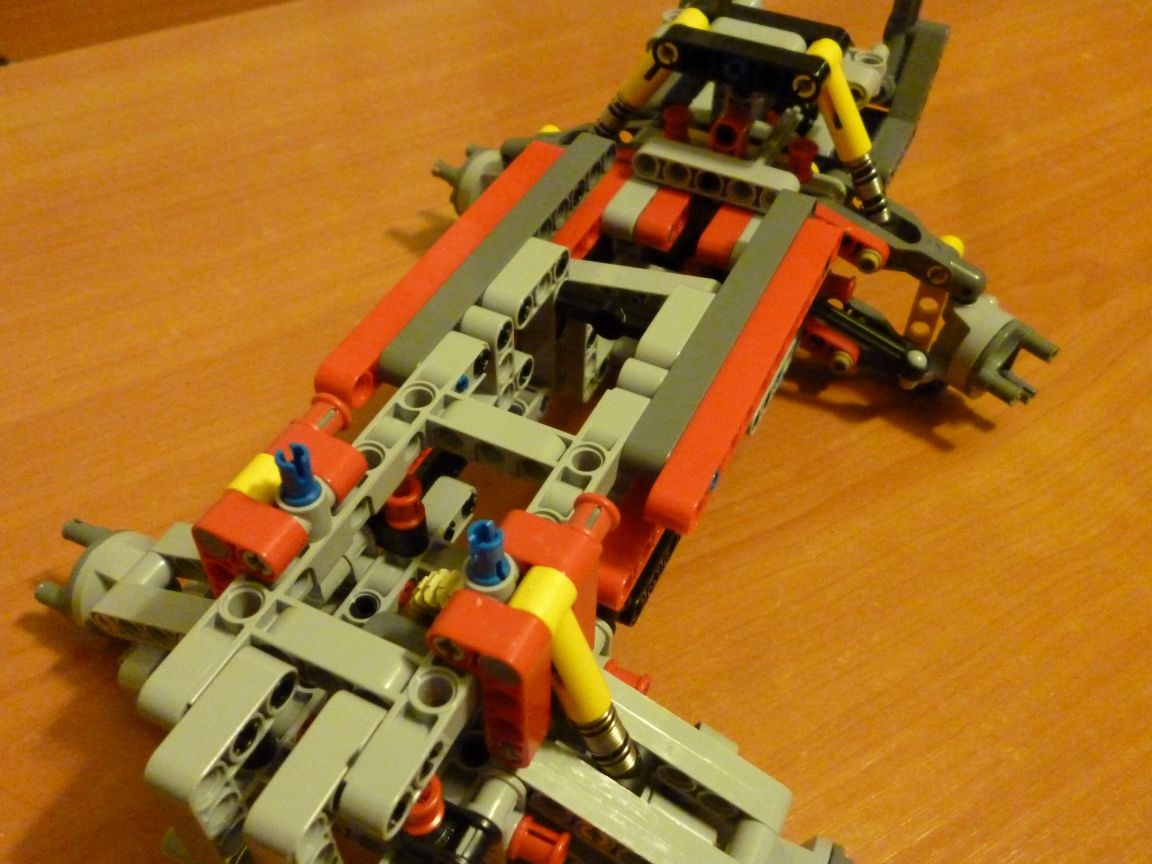
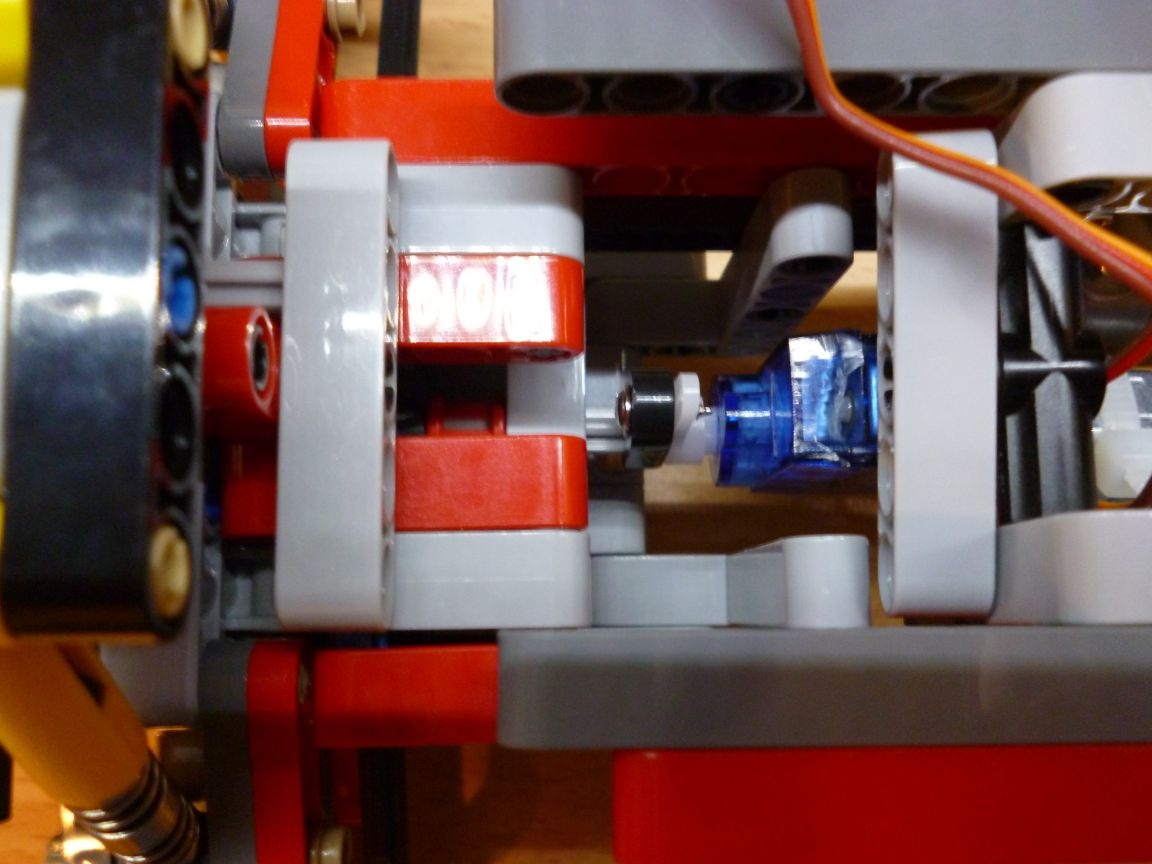
Na vykonanie rotácie vzal servo SG-90. Je potrebné opatrne vyvŕtať, aby sa nedotýkali vnútorných častí, priechodný otvor s priemerom 3,2 mm alebo len rezaný stacionárnym nožom. Vystrihnite tiež vyčnievajúce časti („krídla“ na upevnenie). Do vyrobeného otvoru vložíme skrutku a pripevníme ju maticami. Na servo hriadeľ nasadíme páku so skrutkovanou časťou z lega:
zostava:
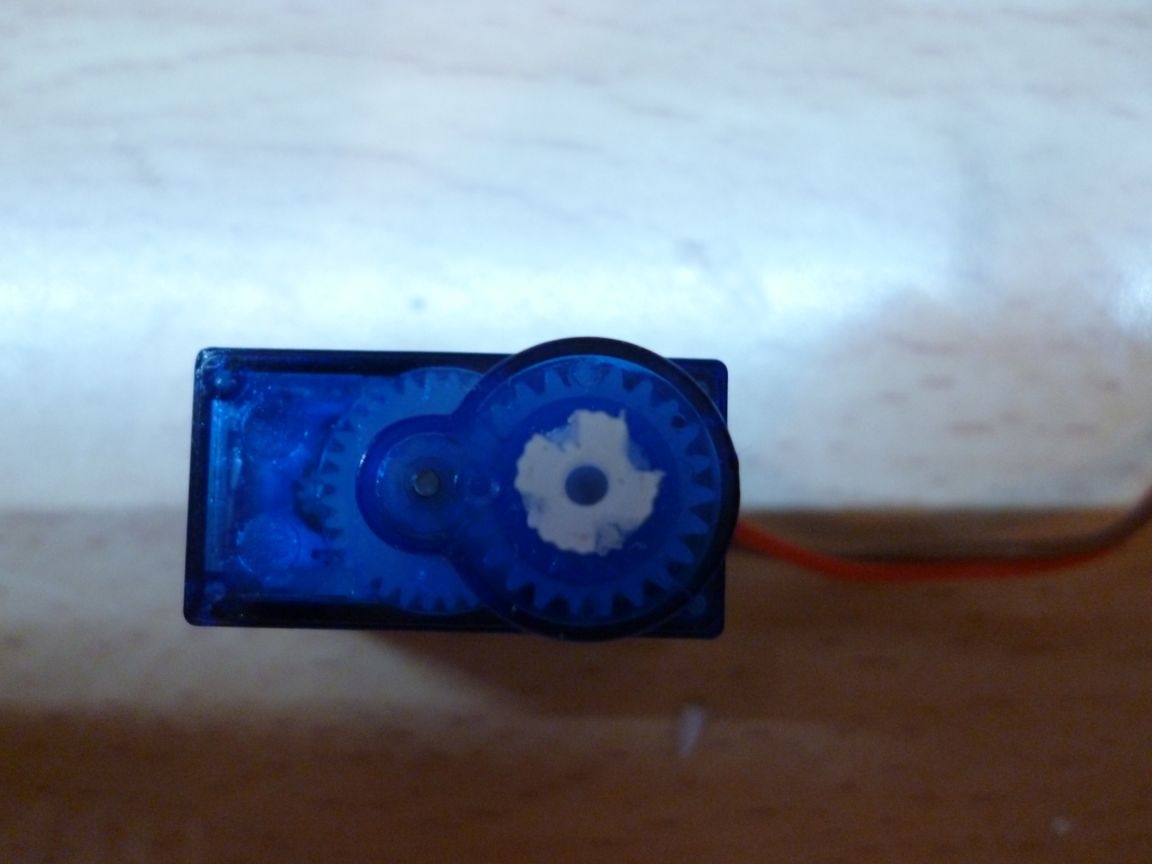
Na navijak použijeme druhé servo. Robíme to isté ako u prvého. A teraz je potrebné ju modernizovať, aby sa mohla voľne otáčať. Za týmto účelom rozoberáme servopohon, demontujeme dosku a spájkujeme vodiče priamo k motoru. Vyberieme hlavný prevodový stupeň a prerušíme jeho jazdné zarážky.Nakoniec na hlavnom výstroji urobíme výrez s administratívnym nožom ako na fotografii:
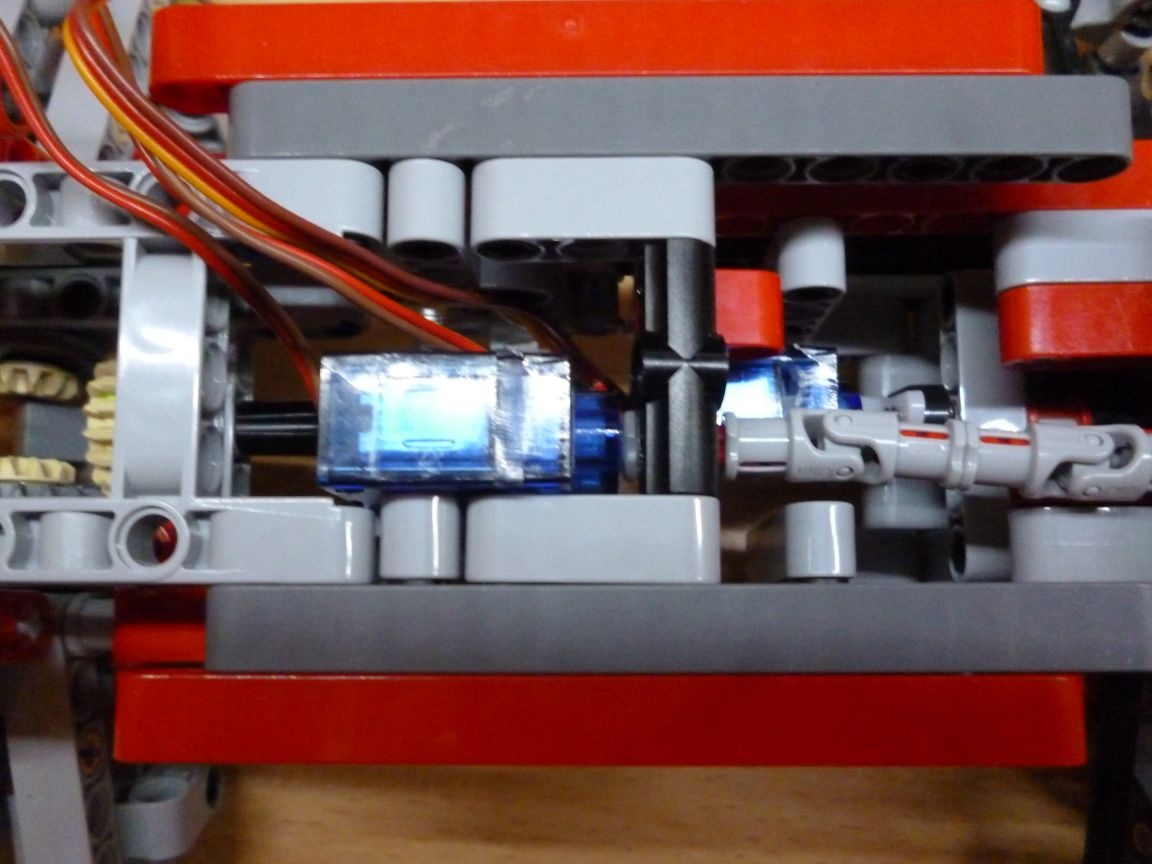
Pripojíme sa k nášmu navijaku a nasadíme na podvozok:

Krok 4 Správa radiča
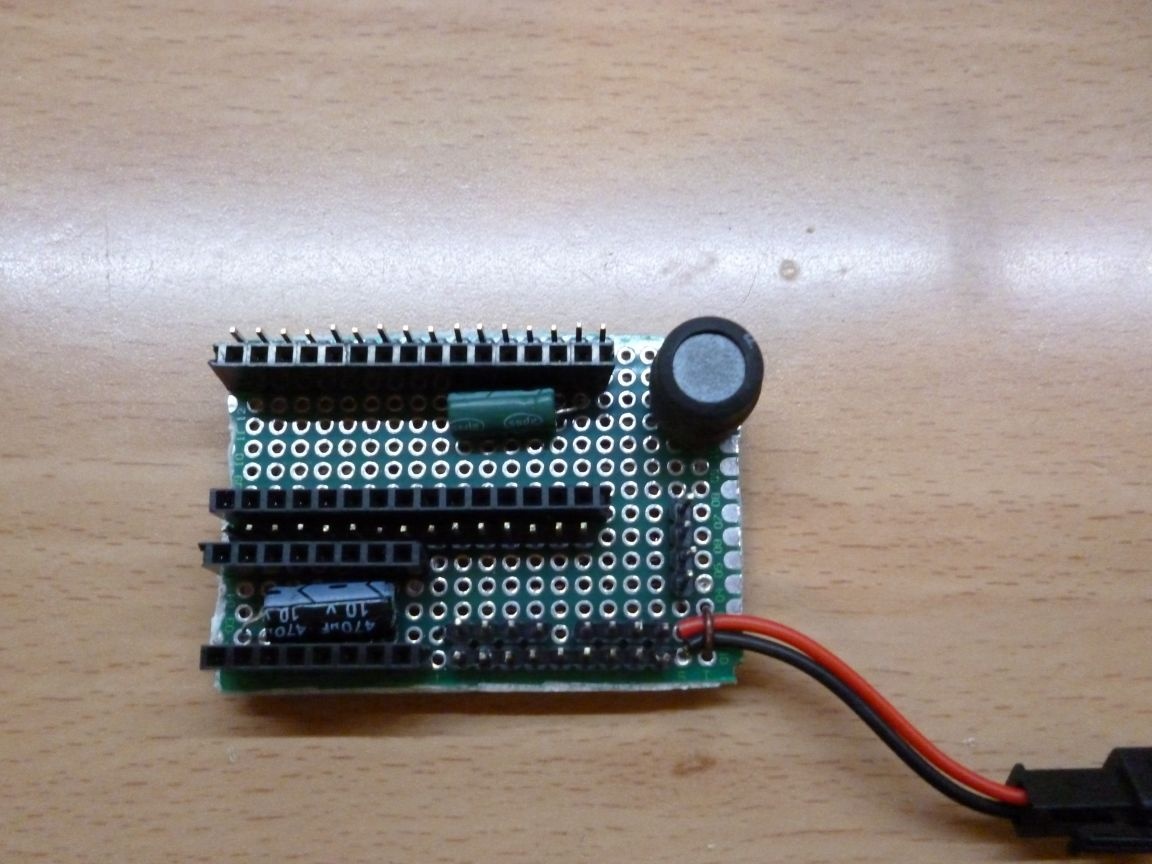
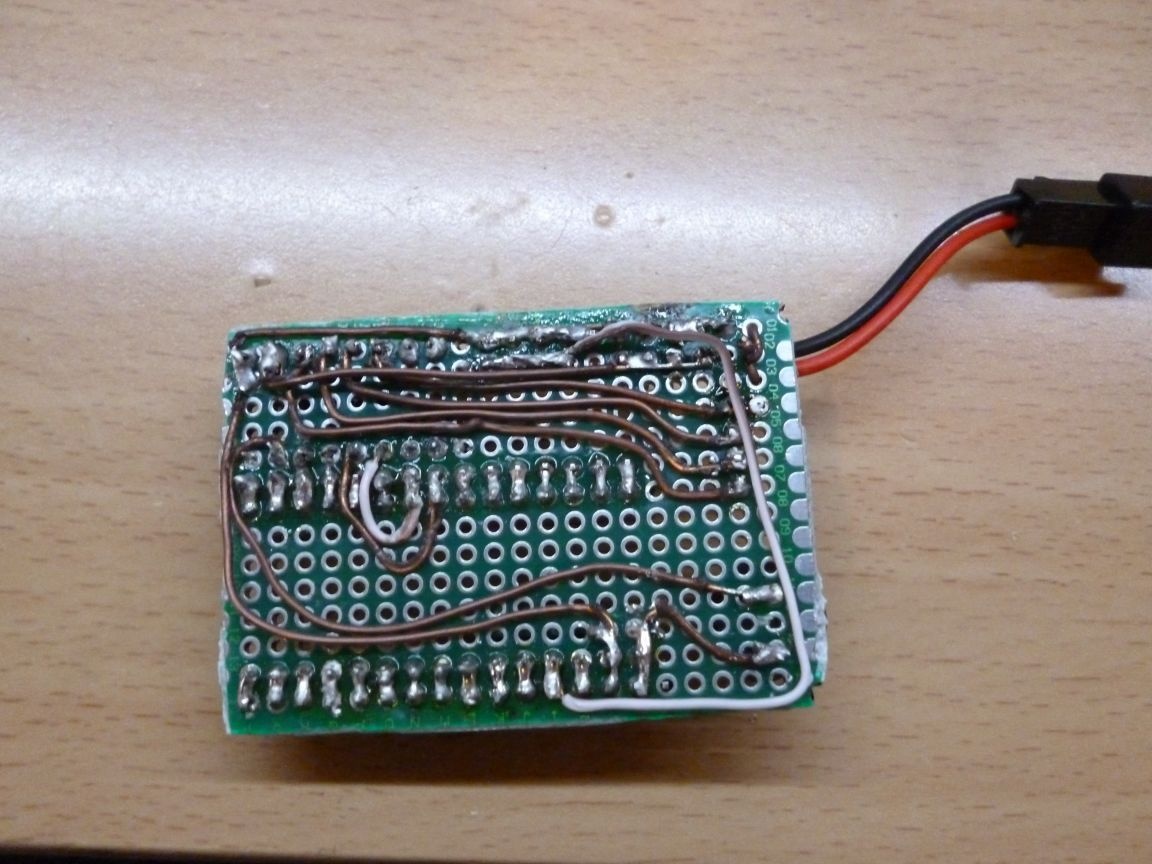
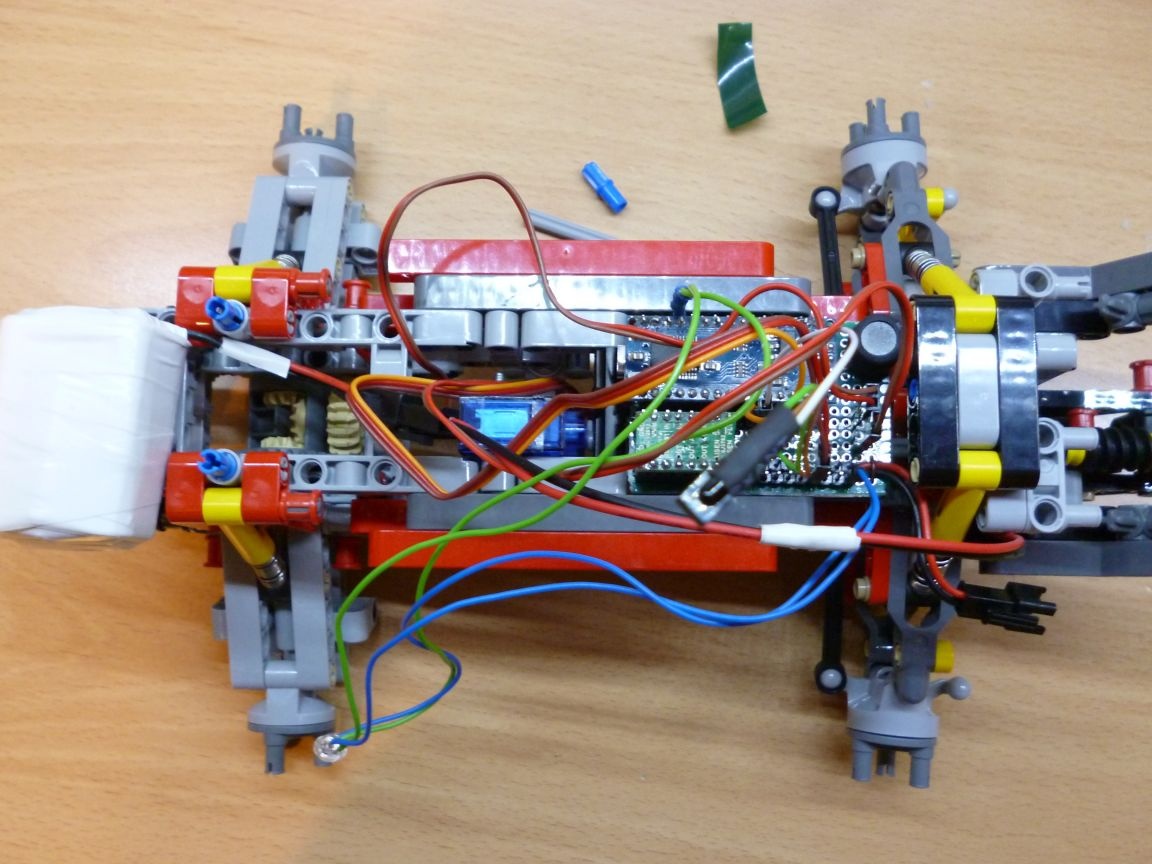
Pre kontrolu použijeme Arduino a IR prijímač. Berieme spájku a na dosku plošných spojov zostavíme:
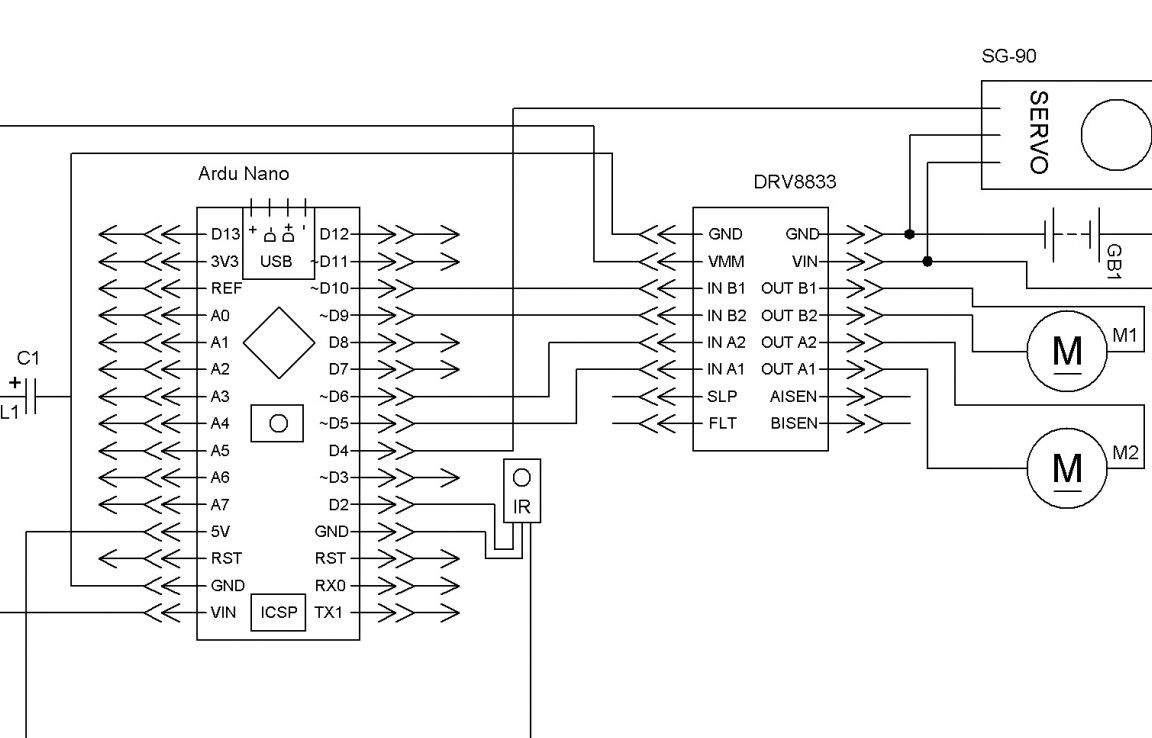
Vysvetľujem: akýkoľvek kondenzátor s nízkym výkonom, indukčná cievka, ktorú nájdete, musíte stabilizovať napätie mikrokontroléra. Pre použité LED diódy sú vybrané odpory. Infračervený prijímač alebo TSOP je možné vziať zo starej hračky alebo si ich môžete kúpiť v obchode. Ak existuje silné rušenie, pridajte kondenzátor do napájacieho obvodu prijímača IR.
Výsledkom je:
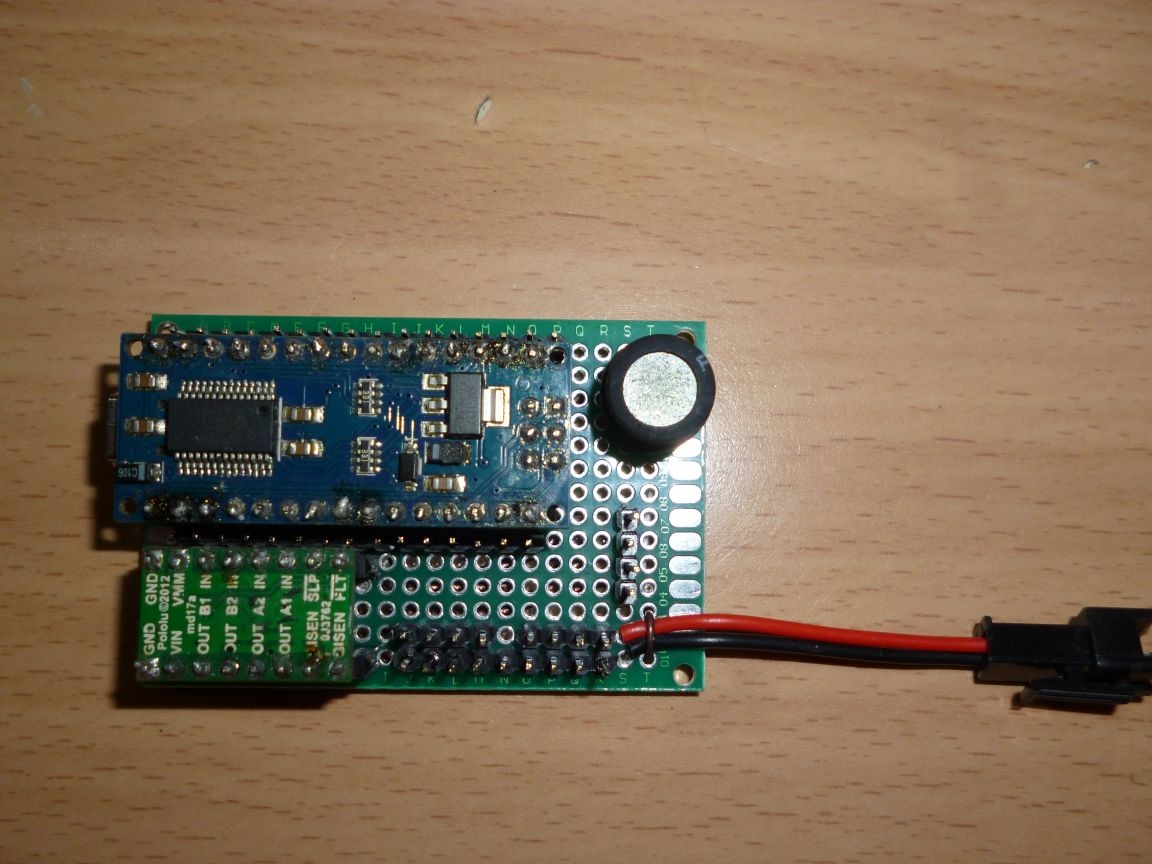
Na svoje miesta inštalujeme Arduino Nano a DRV 8833:
A položte dosku na podvozok:
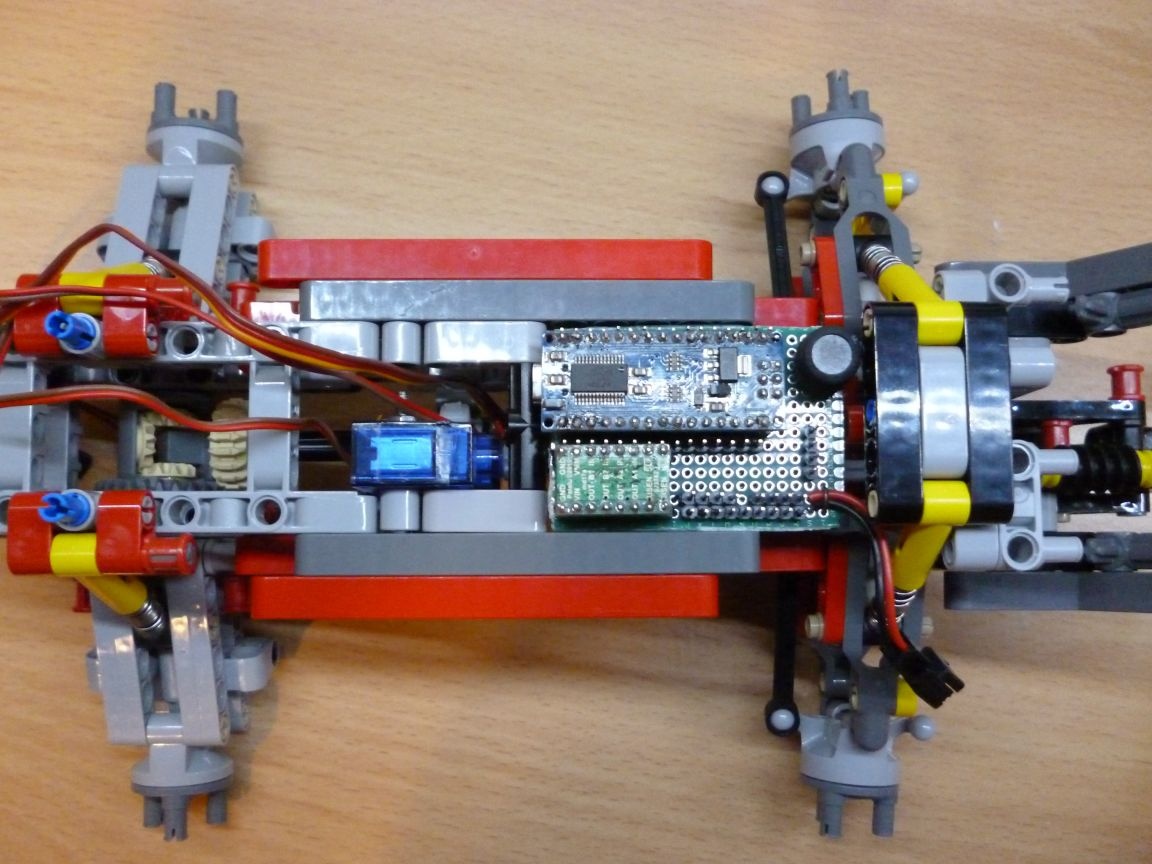
Napájanie - 6 Ni-Mn 1,2 V 1000 mA batérie. Je potrebné ich spájkovať do série a navíjať ich elektrickou páskou. Lepidlo na obojstrannú pásku v zadnej časti podvozku.
Spájame celú našu štruktúru:
Krok 5 Kabína
Kabína je osobne moja improvizácia, neexistujú žiadne pripravené pokyny, takže musíte zbierať z fotografií.



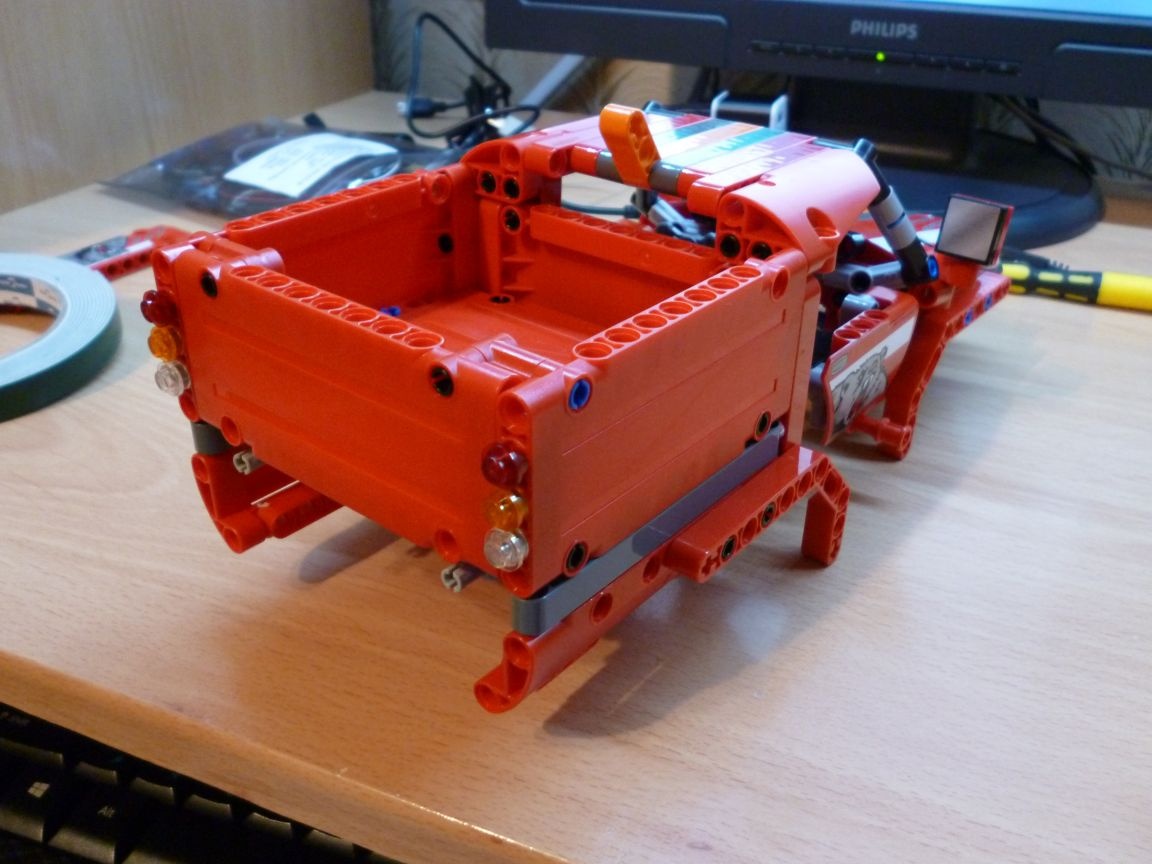
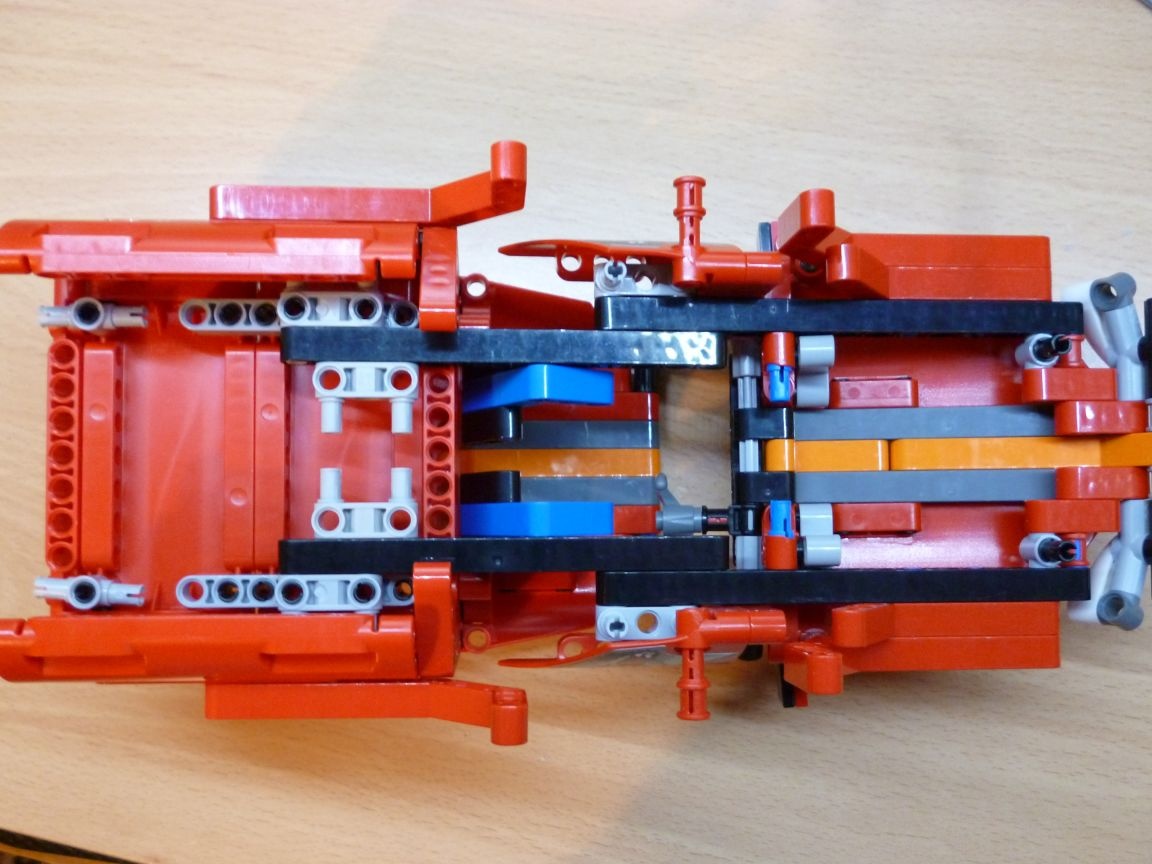
Môžete zostaviť svoju vlastnú verziu, stačí ju umiestniť pod podvozok. Hlavnou vecou je zladenie montáže so šasi. Sú ich štyri a sú zreteľne viditeľné na fotografii zo spodnej časti kabíny.
Firmvér Krok 6.
Dnes však, ako vždy, programujem v Arduino IDE. Najprv musíte vyplniť môj firmvér a cez terminál sa pozrieť na kódy diaľkového ovládania, ktoré budete používať. Môžete si vziať akékoľvek IR diaľkové ovládanie, napríklad z televízora, DVD prehrávača alebo zostaviť svoje vlastné (mám domáce diaľkové ovládanie z joysticku Sega). Stlačením tlačidla v termináli uvidíme kód stlačeného tlačidla, zapíšeme ho na kúsok papiera. Robíme to pomocou všetkých tlačidiel, na ktorých chceme akcie naprogramovať. Ďalej upravte náčrt. Zapíšeme do nich naše kódy pre potrebné kroky a znova ich zablikáme. Tento firmvér je nakonfigurovaný na mojom diaľkovom ovládači Sega. V procese hrania so strojom som si všimol niekoľko nuancií alebo nepríjemností. Je ťažké dosiahnuť spoľahlivý príjem IR príkazov počas pohybu. A stane sa to takto: stlačte šípku vpred, stroj dostal príkaz ísť, a ponáhľal sa vpred, pustil šípku, ale nedostal príkaz na zastavenie a pokračuje v jazde, kým sa zrúti alebo nezasekne, je plný porúch. Tento problém možno čiastočne vyriešiť zvýšením počtu opakovaní odoslania príkazu, je to však možné iba pri použití diaľkového ovládača sami. Ale vyberiem si kardinálnejšie riešenie - prepnem sa na vysielač - prijímač 433 MHz. O tom napíšem v ďalšom článku.
Krok 7 kladený na kolesá.
Preto musíme len dať kabínu na podvozok, nasadiť na kolesá a skontrolovať SUV v činnosti.

