


Časť môjho návrhu som prevzal z montážnych pokynov Lego Technic 42049. Zvyšok je moja improvizácia. Na správu použijem modul Bluetooth pripojený k zariadeniu Android alebo počítaču.
Potrebujeme teda:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 ovládače motora L9110S
- 1 servopohon SG-90
- Bluetooth modul HC-05 alebo jeho ekvivalent
- USB-UART pre firmvér arduino
- Mini prevodový motor 50 ot / min
- Mini motorová prevodovka 100 ot./min
- Motorová prevodovka 6v 150 ot./min
- 2 LED
- 2 odpory 150 ohmov
- Kondenzátor 10 V 1000uF
- 2 jednoradové hrebene PLS-40
- Induktor 68mkGn
- 6 batérií NI-Mn 1,2 V 1000 mA
- Dvojitý kolíkový vodič na vodiče
- Homutik
- Drôty rôznych farieb
- spájka
- Rosin
- spájkovačka
- Skrutky 3x20, matice a podložky pre ne
- Skrutky 3x40
- Skrutky 3x60
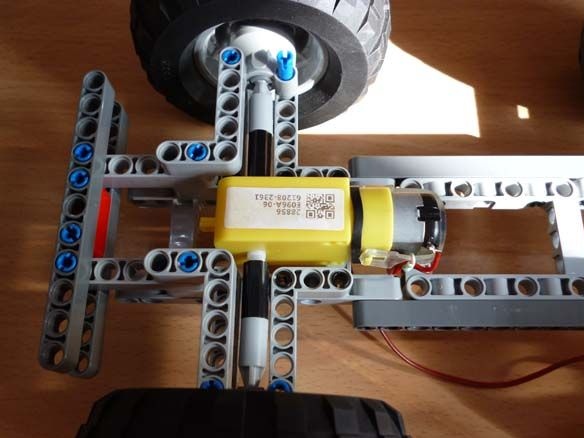
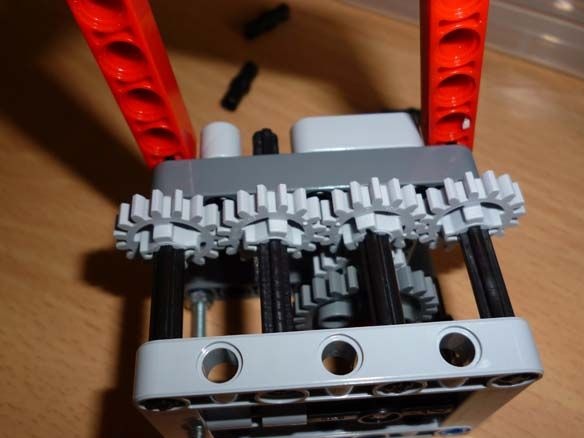
Krok 1 Zostava zadnej nápravy
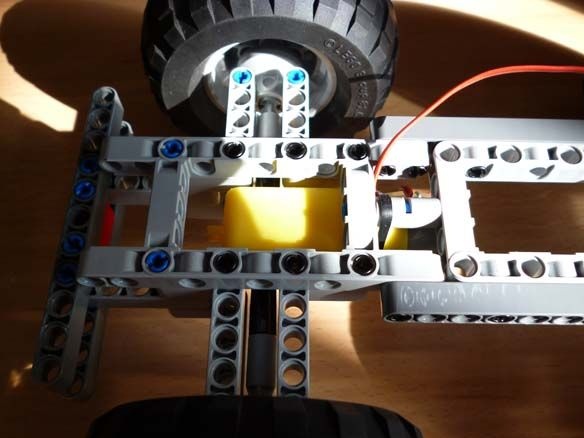
Pre pohyb použijeme prevodový motor so 6 V motorom pri rýchlosti 150 ot./min. Os prevodovky musí byť odrezaná z obidvoch strán a položená na lego diely. Zadná náprava je zostavená takto:
A na druhej strane:
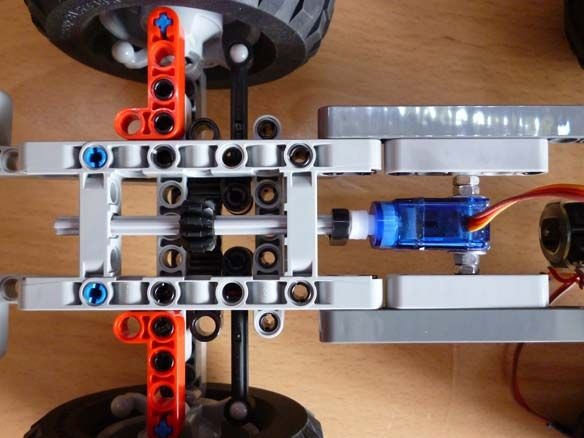
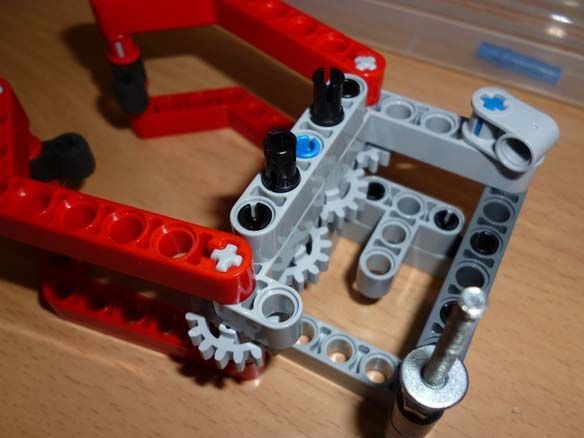
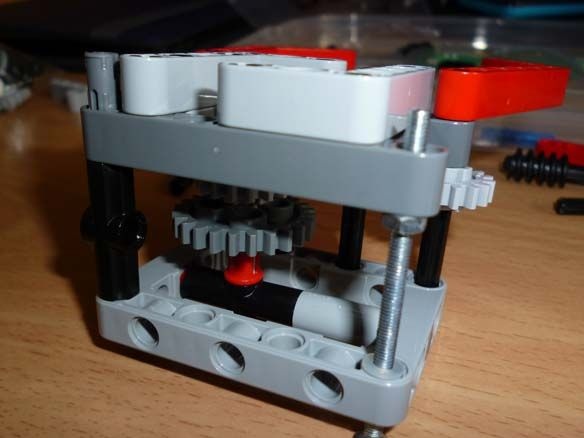
Krok 2 Zostavenie prednej nápravy
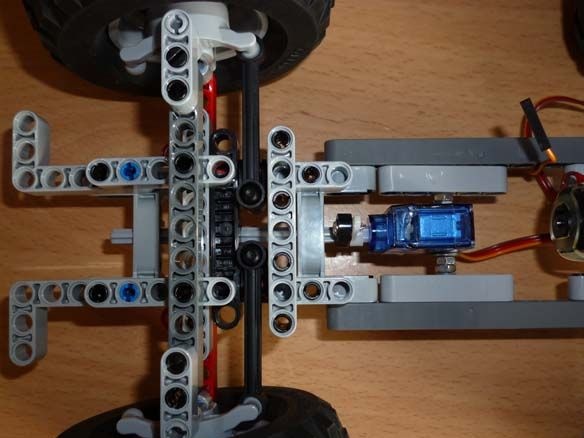
Na otáčanie kolies je servo SG-90 veľmi vhodné. Na jeho upevnenie na náš model je potrebné opatrne vyvŕtať, aby sa nedotýkali vnútorných častí servopohonu, priechodného otvoru s priemerom 3,2 mm alebo len jeho rezu kancelárskym nožom. Vystrihnite tiež vyčnievajúce časti („krídla“ na upevnenie). Do vyrobeného otvoru vložíme skrutku a pripevníme ju maticami. Na servo hriadeľ nasadíme páku so skrutkovanou časťou z lega:

A na druhej strane:
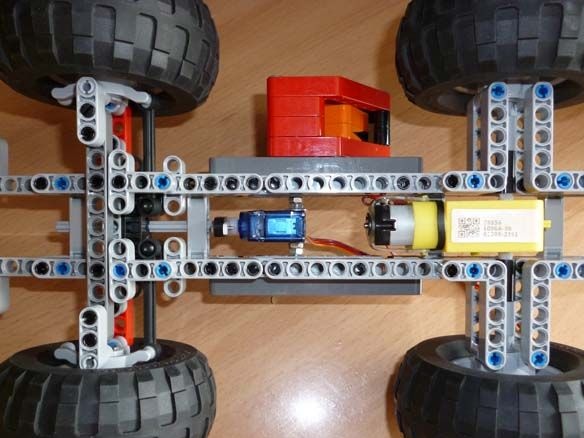
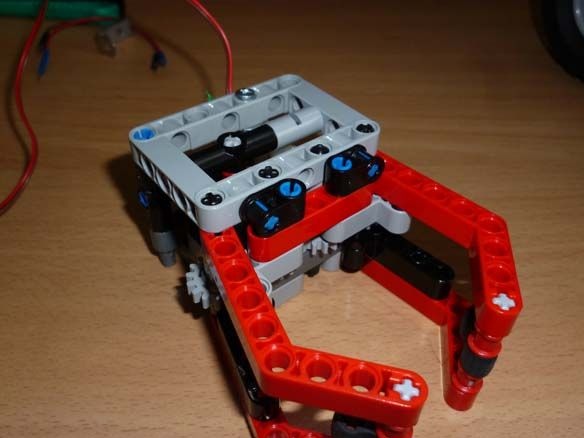
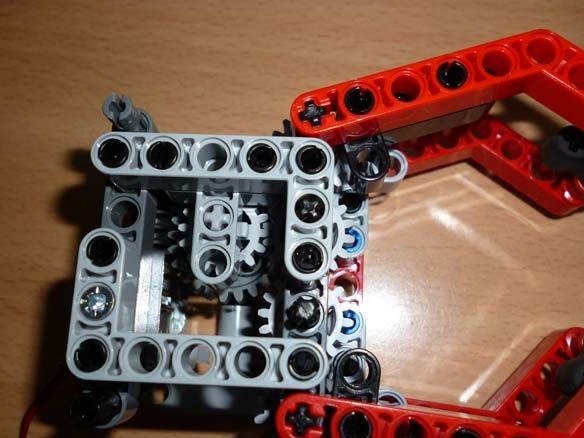
Krok 3 Zostavenie základne a kabíny
Spojíme oba mosty, ako je to znázornené na fotografii:

Zostavujeme kabínu (potrebnú pre krásu):
Kabínu sme umiestnili na základe:

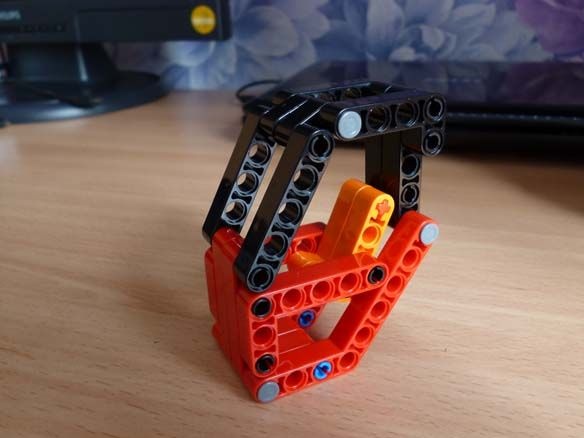
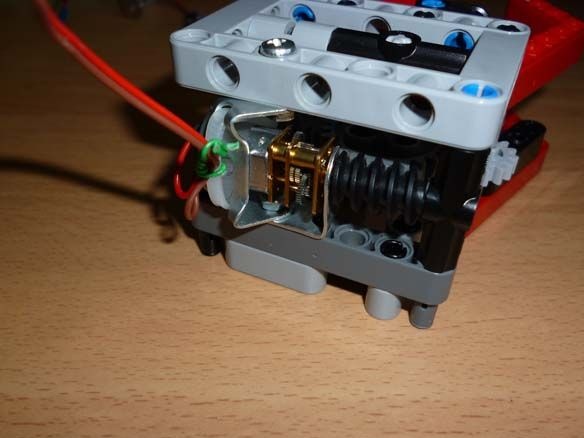
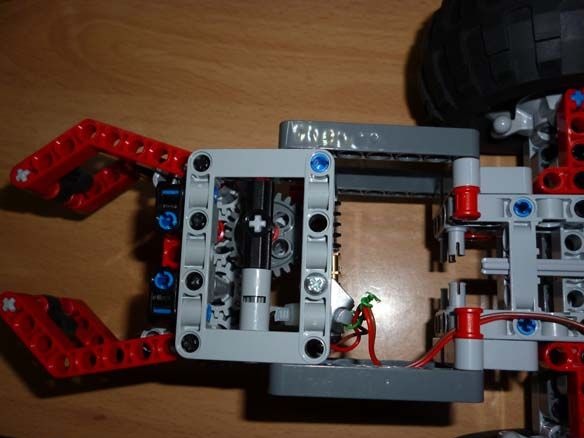
Krok 4 Dajte čiapku alebo pazúr
Čeľusť je poháňaná mini motorovou prevodovkou pri rýchlosti 50 ot / min. Problém pripojenia prevodového motora s časťami projektanta som vyriešil nasledovne: Položil som spojovaciu objímku na os motora prevodového motora a vložil šrot zápalky na upevnenie. Pri montáži používal prevodový motor kovový plast od dizajnéra železa a svorku. Ukázalo sa, že:

Ďalej vyberieme pazúr z fotografie:

Pripevňujeme ho k základni:

Pre zdvíhanie pazúry je vhodná mini motorová prevodovka s rýchlosťou 100 ot / min:


Krok 5 Elektrikár
Pre kontrolu použijeme Arduino Pro Mini a Bluetooth modul. Na pripojenie motorov sú potrebné motorové ovládače.
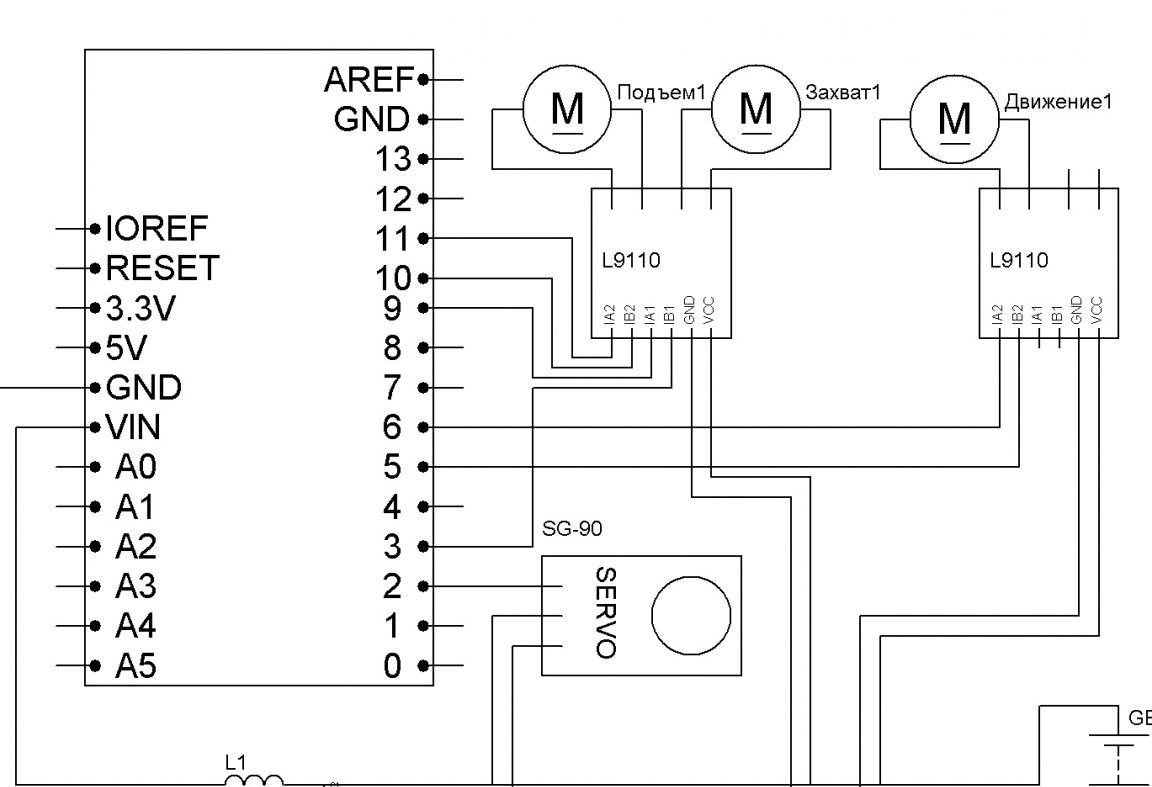
Spojenie všetkých komponentov s vodičmi Dupont od matky k matke.Napájanie - 6 NI-Mn 1,2 V 1000 mA batérie zapojené do série. Kondenzátor akéhokoľvek nízkeho výkonu, induktor tiež nájdete, musíte stabilizovať výkon mikrokontroléra. Anódy dvoch LED sú pripojené k arduino so 4 pinmi, katódy k GND. Pre použité LED diódy sú vybrané odpory. Pre lepšie pohodlie batériu navíjajte páskou.

Lepíme to všetko na obojstrannú pásku na základe:

Krok 6 Nastavenie Bluetooth
Najdostupnejšími modulmi Bluetooth dnes sú HC-05 a HC-06. V čínskych internetových obchodoch sú hojné. Rozdiely medzi nimi spočívajú v tom, že prvý môže pracovať v režime master (slave) aj v režime slave (master). Druhým je čisto slave zariadenie. Inými slovami, HC-06 nemôže detegovať spárované zariadenie a nadviazať spojenie s ním, môže sa riadiť iba masterom.
Stručná charakteristika modulov:
- Bluetooth čip - BC417143 vyrobený spoločnosťou
- komunikačný protokol - špecifikácia Bluetooth v2.0 + EDR;
- akčný rádius - do 10 metrov (výkonová úroveň 2);
- Kompatibilné so všetkými adaptérmi Bluetooth, ktoré podporujú SPP;
- množstvo pamäte typu flash (na ukladanie firmvéru a nastavení) - 8 Mbit;
- frekvencia rádiového signálu - 2,40 .. 2,48 GHz;
- rozhranie hostiteľa - USB 1.1 / 2.0 alebo UART;
- spotreba energie - prúd počas komunikácie je 30-40 mA. Priemerná hodnota prúdu je asi 25 mA. Po nadviazaní spojenia je spotrebovaný prúd 8 mA a nie je v režime spánku.
Zvyčajne sa moduly predávajú ako dve dosky spájkované spolu. Menší modul je továrenský modul, ktorý sa bežne používa v rôznych verziách elektronický zariadení. Veľký - špeciálna doska pre domácich majstrov. Vyzerá to ako menšia doska s čipom BC417:

A tak samotné DIY moduly HC-05 a HC-06:
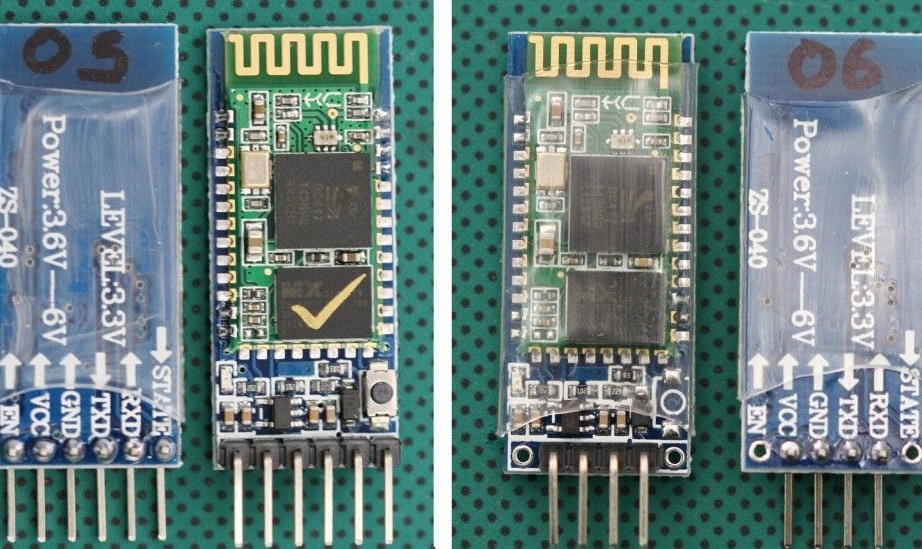
V zásade môžete použiť akýkoľvek modul, ktorý sa vám páči. Modul bez doštičky je lacnejší, ale potom sa budete musieť starať o 3,3 V napájanie modulu a sami sa mučiť spájkovaním drôtov k modulu. Optimálny pomer cena / funkčný som si vybral podľa môjho názoru HC-06.
Spojujeme sa nasledovne:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Pre správnu funkciu musí byť modul nakonfigurovaný. Nakonfigurujeme AT príkazy zadané do okna terminálu. Uvádzam príklad nastavenia modulu HC-05. Ak máte iné nastavenie, môže sa líšiť. Aby náš modul prijímal príkazy, najskôr vypálime Arduino s nasledujúcim firmvérom:
V tomto prípade Arduino slúži ako most medzi počítačmi a modulom. Vo firmvéri používam knižnicu SoftwareSerial. Pri vysokých rýchlostiach to funguje nestabilne. Ak chcete vysokú rýchlosť, môžete modul pripojiť priamo k kontaktom Arduino RX a TX a prepísať firmvér. Ale v mojom prípade budeme pracovať s modulom rýchlosťou 9600. Po ukončení firmvéru otvorte terminál a zadajte:
„AT“ (bez úvodzoviek) by mala prísť odpoveď „OK“ (to znamená, že je všetko správne pripojené a modul funguje)
„AT + BAUD96000“ (bez úvodzoviek) by mala prísť odpoveď „OK9600“.
Ak máte správnu odpoveď, prejdite na ďalší krok.
Krok 7 Firmvér
Na napísanie firmvéru a samotného firmvéru používam Arduino IDE. Aktuálna verzia pre dnešok je 1.8. Aktuálny firmvér:
Krok 8 Nastavte telefón.
Na telefóne s Androidom musíte nainštalovať program na ovládanie robota cez Bluetooth. Je ich veľa. Do služby Google Play môžete zadať „Bluetooth Arduino“ a vybrať si podľa svojho vkusu. Páčilo sa mi BT Controller. Stiahnite si a nainštalujte si do svojho telefónu alebo tabletu Android. Ďalej je potrebné prostredníctvom nastavení systému Android nadviazať spojenie s naším modulom. Heslo pre pripojenie je „1234“ alebo „0000“. Ďalej nakonfigurujte program pre príslušné príkazy. Zoznam je uvedený nižšie.
Krok 9 Nastavenie počítača (ak je to potrebné)
Ak je to potrebné alebo len kvôli pohodlnosti ovládania, môžete použiť počítač alebo laptop. Počítač musí mať rozhranie Bluetooth. Nadviazame komunikáciu s naším modulom prostredníctvom ovládacích prvkov na počítači. Ďalej potrebujeme terminál na odosielanie príkazov. Akékoľvek vhodné pre vás. Po zaznamenaní firmvéru sa ovládanie vykonáva pomocou nasledujúcich tlačidiel (príkazov):
W - vpred
S - späť
A - vľavo
D - správne
F - stop
G - volant
K - svetlomety
L - vypnutý svetlomet
R - zdvihnite
E - z kopca
Q - zastavenie zdvihu
T - snímanie
Y - Uvoľnenie
H - Stop Claw
Neustále zadávanie príkazov je nepohodlné, preto odporúčam používať program na odosielanie príkazov. Používam Z-Controller.V programe vyberte port (com port, cez ktorý sa vytvára spojenie) a nakonfigurujte kľúče pre príkazy. Nastaviť nečinnosť a intuitívne.
