

A teraz sa odvracia od slnka. Funguje to veľmi jednoducho: na pevnej doske sú tri fotorezistory, jeden predný a dva bočné. Ak sú bočné fotorezistory rozsvietené, ale predná strana nie je, zariadenie otočí rozloženie slnečnice vpred. S akoukoľvek nevyváženosťou - otočte sa správnym smerom. Tento dizajn, kombinujúci elektronika a humor, vynašiel Instructables pod prezývkou shivtej1505.
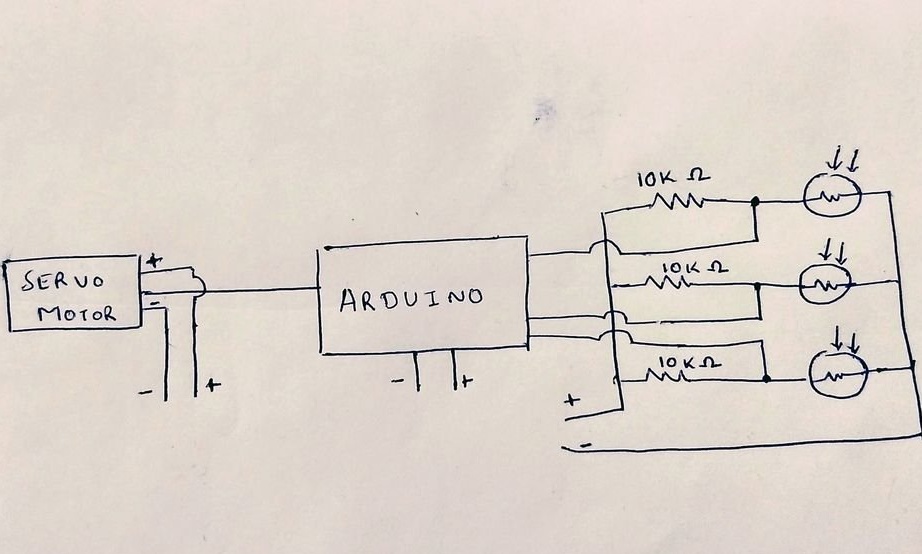
Fotorezistory sú ťahané 10-ohmovými odpormi. Čím je teda fotorezistor jasnejší, tým menšie je kladné napätie vzhľadom na bežný drôt. Nevhodné, ale softvér v systéme Windows Arduino invertuje všetky tri analógové signály o nič horšie ako operačné zosilňovače, ktoré nie sú potrebné. Rovnaký softvér generuje signál na riadenie servomotora pomocou štandardnej knižnice servo.h.
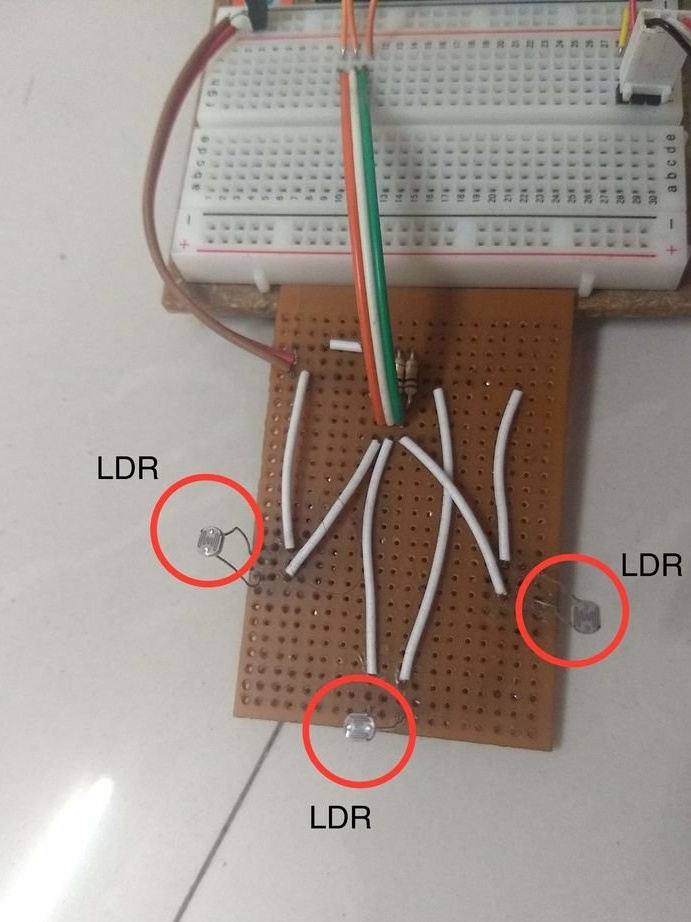
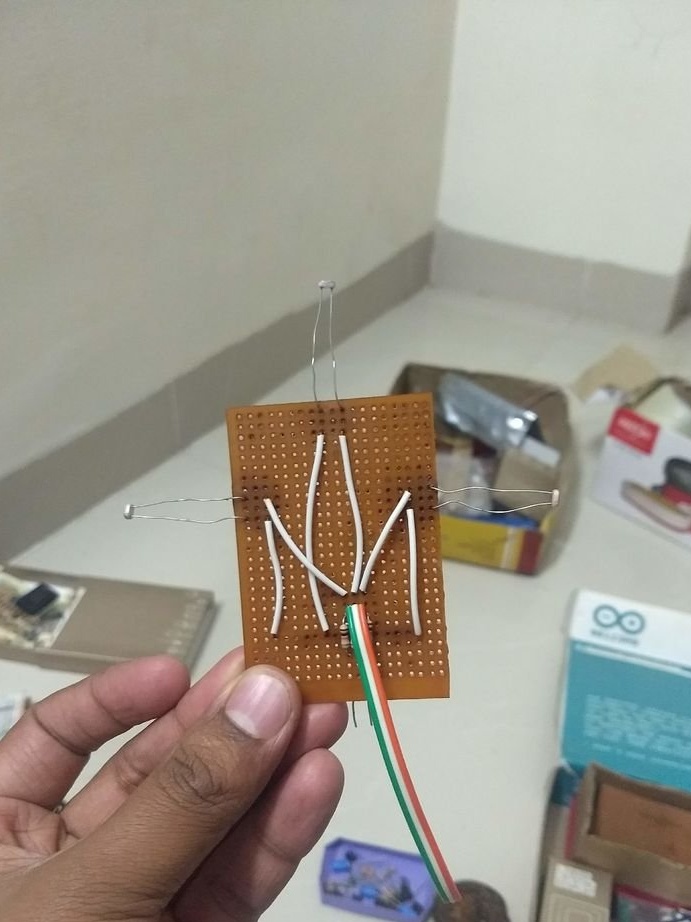
Na dvoch maketách, jednom type perfboard, druhom type breadboard, ale zatiaľ bez Arduino, to všetko vyzerá takto:
Závery dosky, ku ktorej sú pripojené fotorezistory a servomotor, sú uvedené skica, Ak v ňom nič nezmeníte, signály z fotorezistorov sa budú musieť privádzať na analógové vstupy: zľava na A0, zo stredu na A1, zprava na A2 a odstrániť signál pre servomotor z výstupu 13.
Master spája fotorezistory na doskovú dosku typu perfboard:
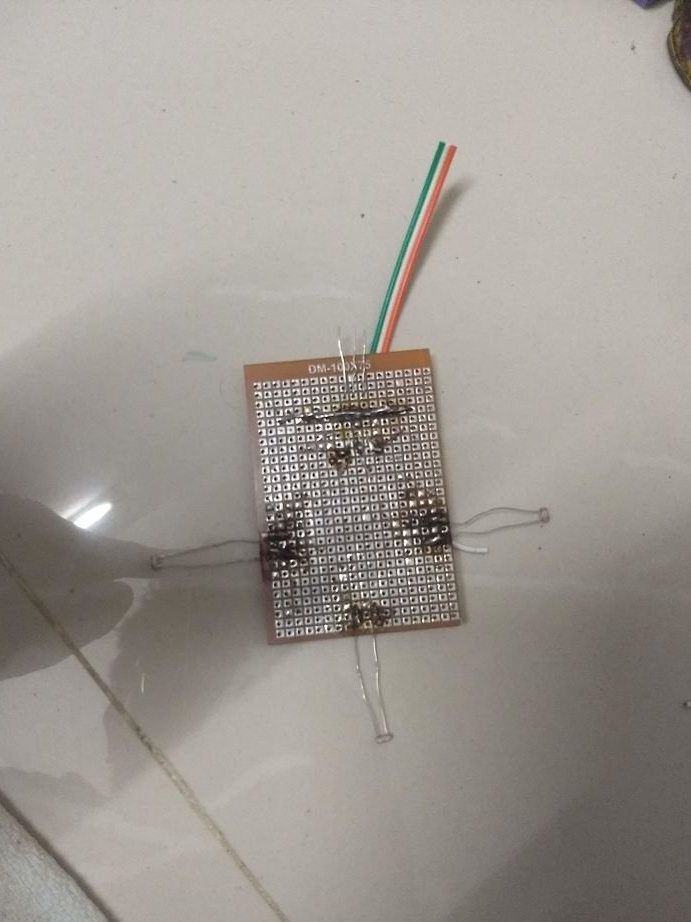
Spojuje ich pomocou spájkovacieho mostíka:
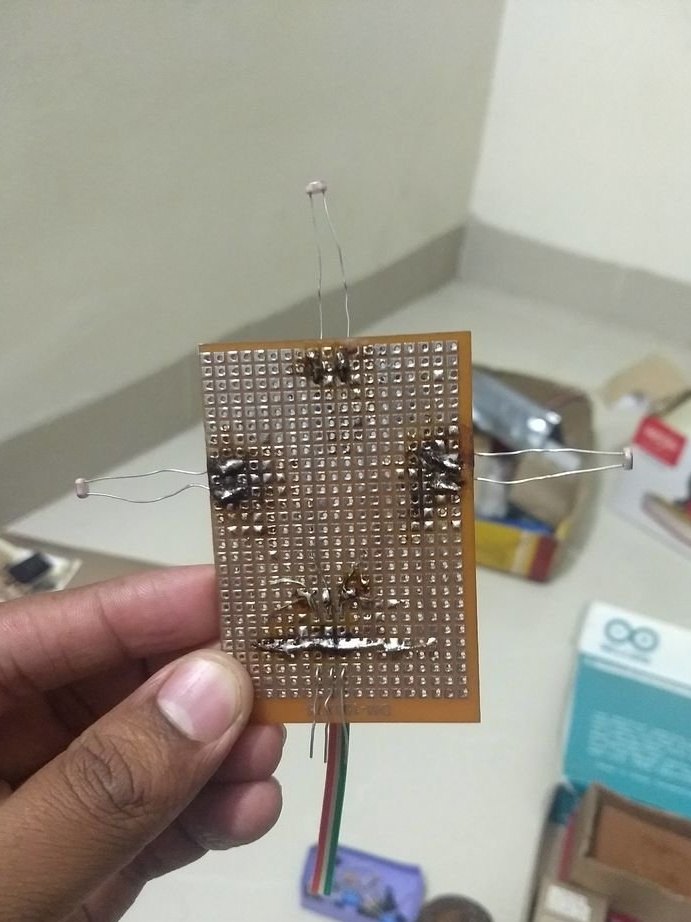
A káble:
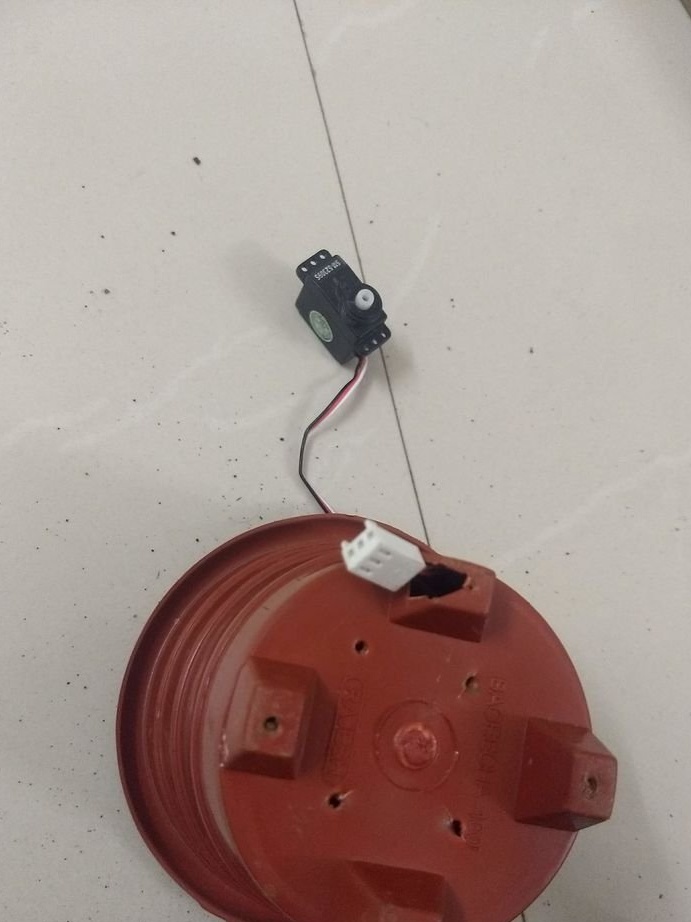
Predĺžuje otvor v nádobe na výstup drôtov servomotora pomocou konektora:

Výstup tohto konektora:
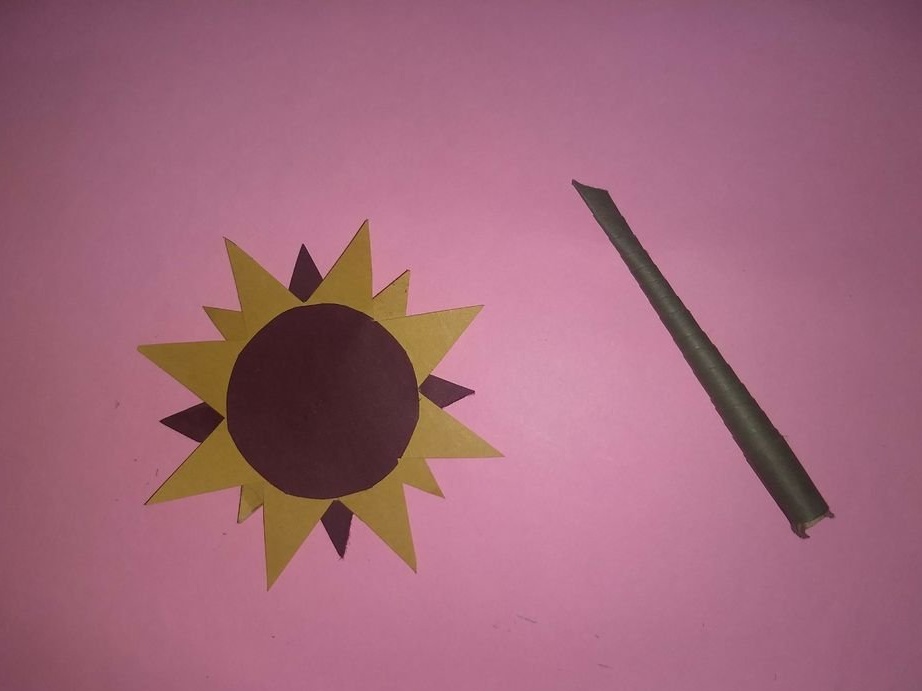
Vytvára slnečnicové usporiadanie:

Doska typu perfboard sa pripája k doske typu doska a cez ňu k Arduino, ktoré bliká (odkaz na náčrt vyššie). Do nádoby sa naleje suchá zemina, do ktorej sa vloží servomotor s maketou slnečnice na hriadeli. Hlavná vec je, aby ste náhodne nebrali slnečnicu na skutočné a nezalievali ju. Vo všeobecnosti sa nesnažte o nadmerný realizmus. Robotické slnečnice môžu tiež spôsobiť účinok „zlovestného údolia“. Teraz sa pozrime, ako to funguje:
V porovnaní s podobným zariadením od japonského autora Himawariho Akira Nakaushi je navrhovaný dizajn veľmi zjednodušený. Nemá rad LED diód, niekoľko kamier, výpočtový výkon je výrazne znížený.