Pamätajte, aké to bolo
robotvysávač "Kybernetika" v knihe N. N. Nosova "Dunno v solárnom meste"? Musel si pripomenúť, že je čas nastúpiť do práce? Keď sa tieto zariadenia stali realitou, ukázalo sa, že je to potrebné. Zoberte diaľkové ovládanie a stlačte na ňom tlačidlo. Hrdina Pachkulovej práce Pestrenky by po tom, čo to videl, si určite všimol: „Aký druh automatizácie je to, ak potrebujete stlačiť tlačidlo, ak by to mal mať bez tlačidiel?“ Autor Instructables pod prezývkou ShaperG to tiež myslel. A urobil
Urob to sám zariadenie na spustenie robotického vysávača podľa plánu.
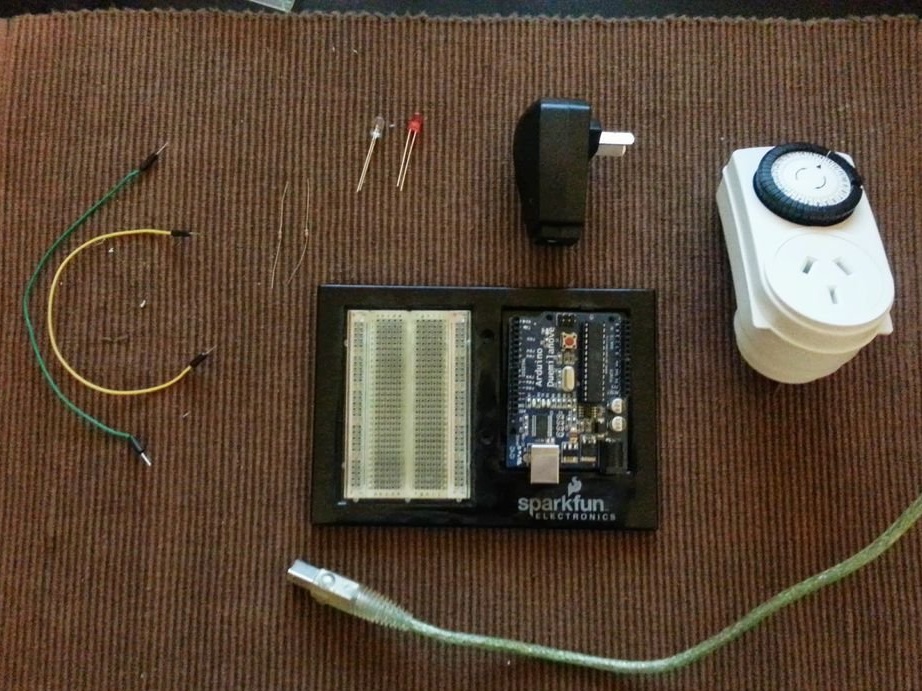
domáci produkt pozostáva z mechanického časovača na zapínanie rôznych elektrických spotrebičov podľa plánu (Ikea alebo akýkoľvek iný), napájania,
Arduino, doštičková doska a dvojité prepojky (voliteľné, môžete spájať všetko spájkovaním), dve LED diódy - viditeľná žiara a infračervené žiarenie, dva odpory 330 Ohm, puzdro Sparkfun alebo akékoľvek iné.
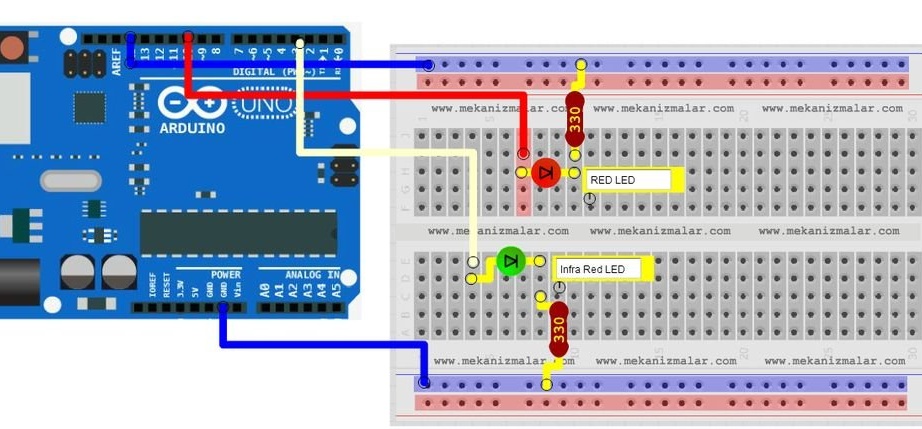
Po výbere všetkých potrebných komponentov sprievodca zostaví schému. A opäť v programe typu Fritzing, v tomto prípade, v online aplikácii Mekanizmalar. Nie každý má rád tento spôsob zostavovania schém, ale ako je možné všetko prepojiť, je pochopiteľné.
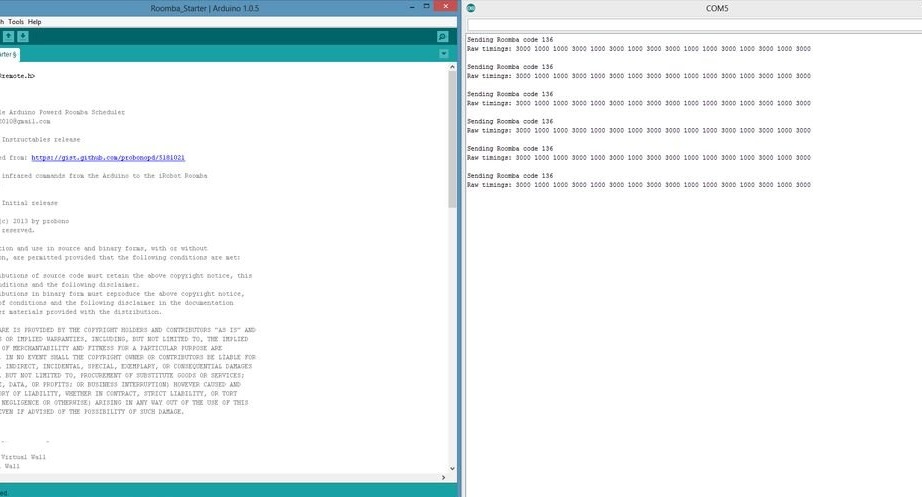
Po rozhodnutí o schéme sprievodca začne programovať:
Berie knižnicu
tua skica je
tu, Zjednodušuje náčrt tak, že keď je napájanie zapnuté, každých päť sekúnd nepretržite vysiela „čistý“ príkaz. Skica bude musieť byť dokončená, ak
model vysávač sa líši od iRobot Roomba 530. Majster to dopadne takto:
#include
/ *
Super jednoduchý plánovač Arduino Powerd Roomba
2013-08-03 Vydanie inštrukcií
Kód bol upravený na: https://gist.github.com/probonopd/5181021
Pošlite infračervené príkazy z Arduina do iRobot Roomba
probono
2013-03-17 Úvodné vydanie
Copyright (c) 2013 by probono
Všetky práva vyhradené.
Redistribúcia a použitie v zdrojových a binárnych formách, s alebo bez
úpravy sú povolené za predpokladu, že sú splnené tieto podmienky:
1. Redistribúcia zdrojového kódu si musí zachovať vyššie uvedené oznámenie o autorských právach
zoznam podmienok a nasledujúce vylúčenie zodpovednosti.
2. Redistribúcie v binárnej forme musia reprodukovať vyššie uvedené oznámenie o autorských právach,
tento zoznam podmienok a nasledujúce vylúčenie zodpovednosti v dokumentácii
a / alebo iné materiály dodávané s distribúciou.
TENTO SOFTVÉR JE POSKYTOVANÝ DRŽITEĽMI AUTORSKÝCH PRÁV A POVINCOVI „AKO SÚ“ A
ŽIADNE VÝSLOVNÉ ALEBO IMPLIKOVANÉ ZÁRUKY, VRÁTANE IMPLIKOVANÝCH, ALE NEMUSENÉ OBMEDZENÝCH
ZÁRUKY NA OBCHODNOSŤ A VHODNOSŤ NA URČITÝ ÚČEL SÚ
Odvolanie. ZA ŽIADNEHO UDALOSTI NEZODPOVEDÁ MAJITEĽ AUTORSKÝCH PRÁV A DODÁVATEĽOV
ŽIADNE PRIAME, NEPRIAME, NÁHODNÉ, ŠPECIÁLNE, EXEMPLÁRNE ALEBO NÁSLEDNÉ POŠKODENIA
(VRÁTANE, ALE NEOMEDENÉHO, OBSTARÁVANIA NÁHRADNÝCH TOVAROV ALEBO SLUŽIEB;
STRATY POUŽÍVANIA, ÚDAJOV ALEBO ZISKOV; ALEBO PRERUŠENIE PODNIKOV) AKO SPÔSOBILÝ A
O AKÝCHKOĽVEK teórii ZODPOVEDNOSTI, TAK, KTORÉ SÚ V ZMLUVE, PRÁVNE ZODPOVEDNOSTI ALEBO NEBEZPEČENSTVO
(VRÁTANE NEGLIGENCIE ALEBO INÉHO) VYPLÝVAJÚCICH V KAŽDOM CESTE Z POUŽITIA TOHTO
SOFTVÉR, VŽDY, AK SA PORADÍ O MOŽNOSTI TAKÉHO ŠKODY.
* /
IRsend irsend; // pripájané ku kolíku 3; použite tranzistor na pohon IR LED pre maximálny dosah
int LED = 10;
neplatné nastavenie ()
{
Serial.egegin (9600);
pinMode (LED, VÝSTUP);
digitalWrite (LED, HIGH); // zapnúť LED (HIGH je úroveň napätia)
}
prázdna slučka ()
{
roomba_send (136); // Poslať "Vyčistiť"
oneskorenie (5000); // Počkajte 5 sekúnd
}
void roomba_send (int code)
{
Serial.print („kód odoslania Roomba“);
Serial.print (kód);
int dĺžka = 8;
nepodpísané int surové [dĺžka * 2];
unsigned int one_pulse = 3000;
unsigned int one_break = 1000;
unsigned int zero_pulse = one_break;
unsigned int zero_break = one_pulse;
int arrayposition = 0;
// Serial.println ("");
pre (int counter = length-1; counter> = 0; --counter) {
if (code & (1 << counter)) {
// Serial.print ("1");
raw [arrayposition] = one_pulse;
surová [arrayposition + 1] = one_break;
}
else {
// Serial.print ("0");
raw [arrayposition] = zero_pulse;
surové [arrayposition + 1] = zero_break;
}
arrayposition = arrayposition + 2;
}
pre (int i = 0; i <3; i ++) {
irsend.sendRaw (surový, 15, 38);
oneskorenie (50);
}
Serial.println ("");
Serial.print („Surové načasovanie:“);
pre (int z = 0; z
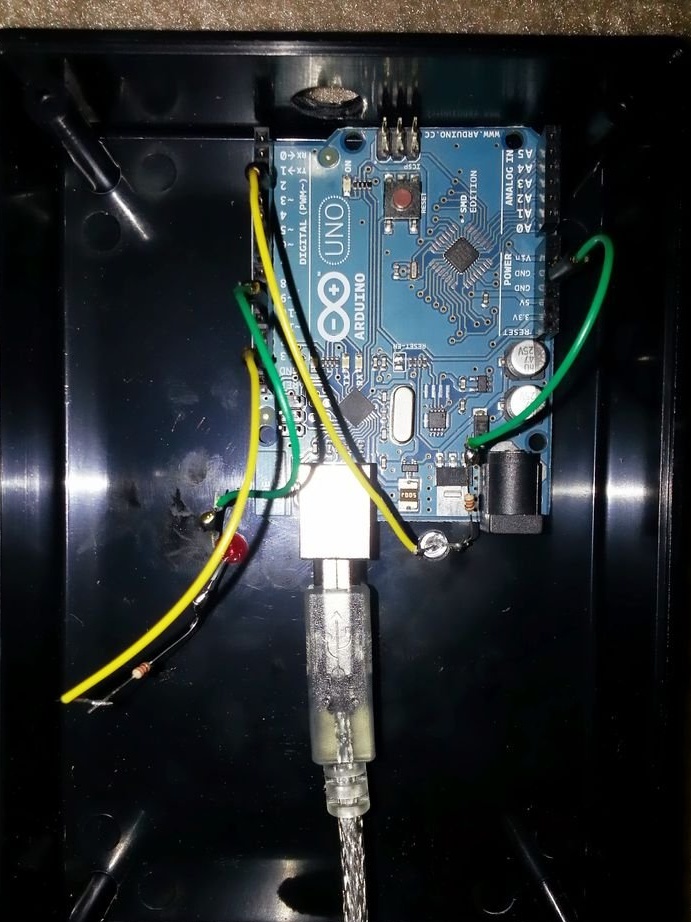
Sprievodca spočiatku skontroluje činnosť náčrtu na výstup sériového portu na monitor. Potom dá všetko do puzdra a napája Arduino nie z počítača, ale zo zdroja pripojeného pomocou mechanického časovača.
Teraz, keď ste umiestnili zariadenie blízko nabíjacej stanice, do ktorej sa vysávač robot vždy vracia, môžete nastaviť rozvrhnutie mechanického časovača na jeho spustenie. Najlepšie zo všetkých - raz denne. Iba nie v noci, ako v práci N. N. Nosov.