
Zvláštnosťou robota BIBOT-1 je, že dokáže vykonávať dve úlohy. Môže sa pohybovať za zdrojom svetla alebo pozdĺž čiernej čiary, ktorú je možné nakresliť na papier. Robot veľmi flexibilný v nastaveniach, to znamená, že neskôr ho možno prispôsobiť akýmkoľvek požadovaným podmienkam, to znamená zvýšiť jeho citlivosť na svetlo alebo menej. Je tiež možné nastaviť rýchlosť otáčania motorov, čo umožní robotovi pracovať lepšie, najmä pri pohybe pozdĺž čiary.

Zariadenie a princíp robota:
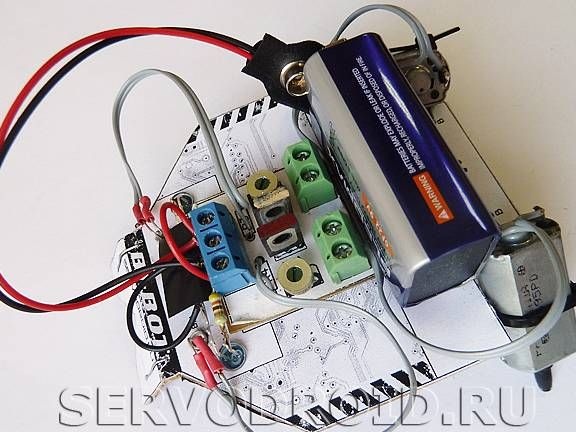
Základňa robota je vyrobená z kartónu, šablóna je vytlačená na tlačiarni a potom spadne. Pokiaľ ide o modul rádiových komponentov, za základ sa považoval textolit, ktorý je pripevnený k základni robota. Na vytvorenie tuhšieho tela sa pri návrhu používajú špeciálne rebrá.
Motory sú inštalované ako vo väčšine z nich DIY, to znamená v uhle. Z tohto dôvodu nie je potrebné vkladať kolesá a prevodovku. Aby sa zabránilo skĺznutiu hriadeľov po povrchu, sú na ne nasadené chrániče.
Ako zdroj energie sa používa batéria 9V typu 6F22. Batéria je pripevnená pomocou pásky a je vždy k dispozícii pre ľahkú výmenu.
Pokiaľ ide o spínač, tak cars rozhodol sa vyhnúť inštalácii. Robot sa zapína a vypína manipuláciou so sponou pripevnenou k batérii.
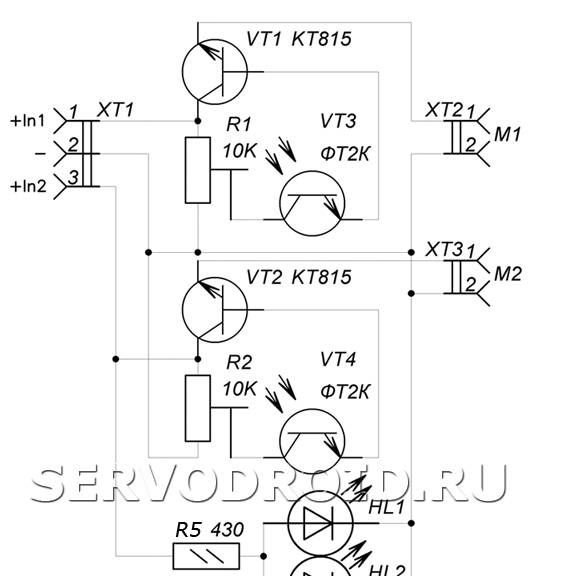
A nakoniec, nastavenie robota. Na nastavenie citlivosti robota má systém dva nastavovacie odpory. Keď sa otáčajú, môžete nastaviť citlivosť robota na svetlo a tiež môžete nastaviť rýchlosť otáčania motorov. Čím je robot citlivejší na svetlo, tým rýchlejšie sa bude pohybovať a naopak.
Pokiaľ ide o princíp činnosti, všetko je uvedené v diagrame.
Materiály a náradie:
- 9V batéria a svorka na pripojenie;
- dva konektory na pripojenie motorov (dvojdielne svorkovnice);
- motory;
- nylonový poter;
- chránič (gumový valec);
- dva fototranzistory;
- dve infračervené LED;
- konzola zo zošívačky;
- trojdielna svorkovnica na pripojenie napájania;
- ladiaci rezistor.

Výrobný proces:
Prvý krok. Dizajn dosiek plošných spojov
Poplatok sa vytvára metódou LUT. Pred prácou musí byť povrch skleneného vlákna dôkladne očistený a potom umytý a dôkladne vysušený. Po výrobe sa vodivé dráhy musia skontrolovať pomocou multimetra na skrat.
Krok dva inštalácia elektronický element
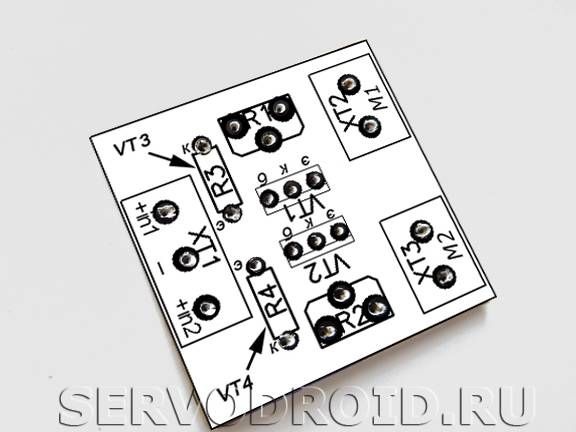
Ďalej musíte vziať kresbu vytlačenú na papieri a prilepiť ju na vytvorenú dosku. V tomto prípade sa otvory na papieri a na doske plošných spojov musia presne zhodovať. Ďalej sú rádiové komponenty nainštalované tak, ako je to znázornené na obrázku. V procese práce musí inštalácia rezistorov R3, R4 nainštalovať fototranzistory VT3, VT4.
Extrémne časti trojdielnej svorkovnice XT1 musia byť spojené pomocou montážneho drôtu. Spojovacie body kontaktov musia byť dobre izolované, najlepšie je použiť rúrku zmršťujúcu teplo.
Krok tri Ako vytvoriť prípad
Výkres tela musí byť vytlačený na bežnom liste papiera A4. Ďalej musíte vziať kúsok vlnitej lepenky a nalepiť naň kresbu, následne musí byť puzdro orezané po obvode.
Ak je piktogram „nožnice“ umiestnený pozdĺž tučných čiar, mali by sa vykonať rezy. Následne, pozdĺž čiernych bodkovaných čiar, musíte ohýbať kartón ako na fotografii a dať čierne šípky.

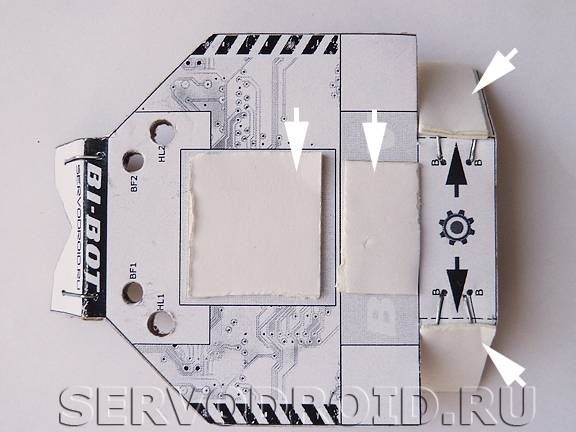


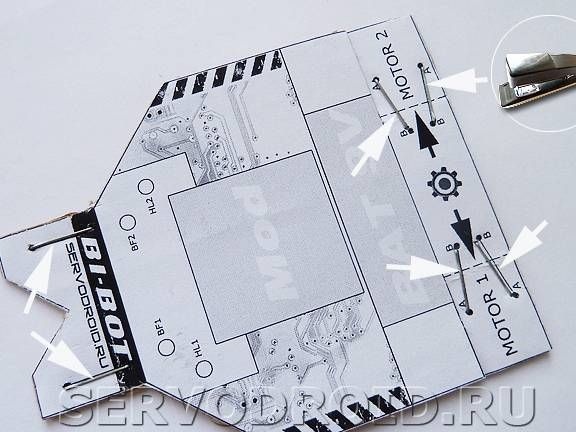


Prednú a zadnú časť krytu do zošitej polohy pomocou zošívačky musíte namontovať konzoly. Miesta ich inštalácie sú označené čiernymi čiarami s krúžkami. Na zaistenie tuhosti rámu sú potrebné svorky. Po namontovaní držiakov sa únava ohýba pozdĺž línií ohybu.
Na miestach označených BF1, BF2 musíte urobiť otvory na inštaláciu fototranzistorov. Na miestach HL1, HL2 musíte vytvoriť také otvory, ktoré zodpovedajú priemeru krytu infračervených diód LED.
Na miestach označených ako Mod, „BAT 9V“ a „MOTOR 1“, „MOTOR 2“ nalepte prúžky obojstrannej pásky.
Krok štyri Inštalácia motorov
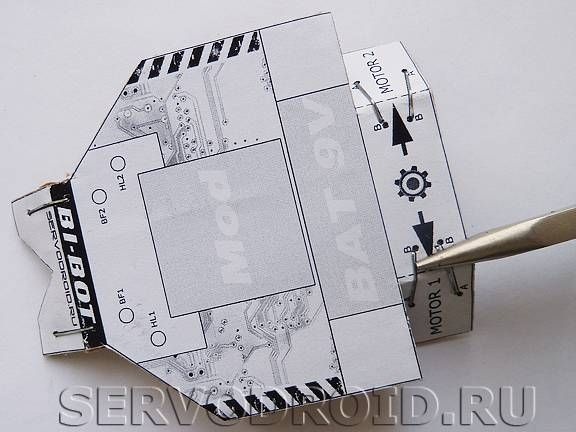
Motory sú namontované na mieste pomocou nylonových sponiek. Aby sa zabránilo skĺznutiu hriadeľov, musia sa nosiť s ochrannými krytmi. Sú vyrobené z gumových pások, ktoré sú v héliových tyčiach pier. V rovnakej fáze spájajte vodiče k motorom.


Krok 5 Inštalácia infračervených LED
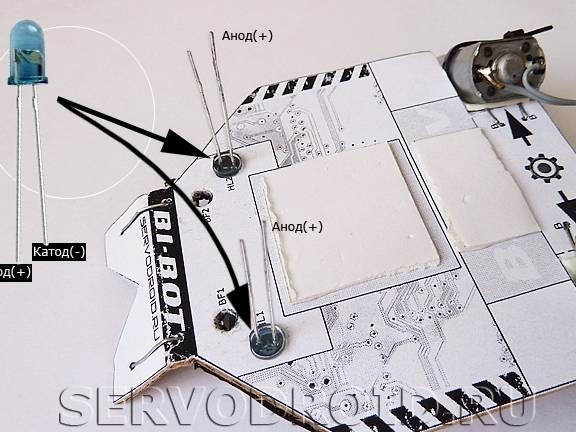
Pri inštalácii infračervených diód LED je dôležité nezamieňať ich závery, pre dovážané prvky je dlhým kontaktom anóda, to znamená plus. LED diódy sú inštalované v pozíciách HL1, HL2, ako je to znázornené na fotografii. Zistenia sú ohnuté tak, že diódy môžu byť zapojené paralelne.
Na kladný kontakt diód LED musí byť pripájaný odpor 430 ohmov a na záporný kontakt čierny vodič.
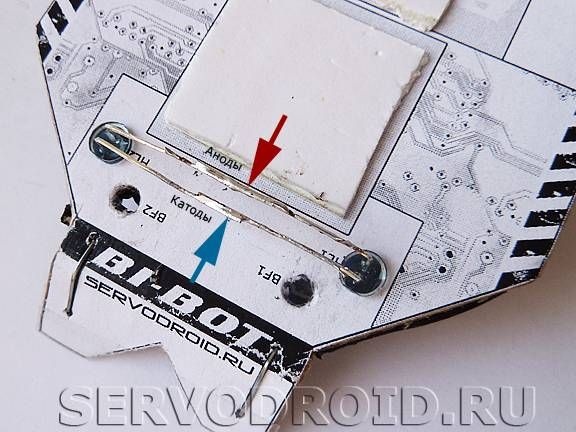
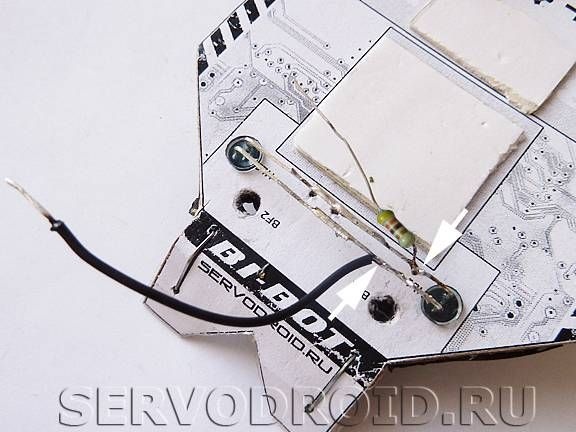
Druhý koniec čierneho vodiča musí byť pripojený k stredovému kolíku trojdielnej svorkovnice. Pokiaľ ide o výstup rezistora, je pripojený na svorku svorkovnice.
Krok 6 Konečná fáza zostavenia
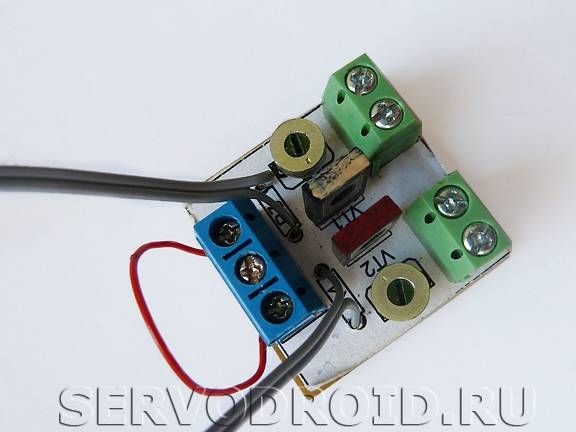
Aby sa robot pohyboval pozdĺž línie, fototranzistory sa umiestnia na miesto BF1, BF2 ako na fotografii.
Tranzistory pre pohyb za zdrojom svetla sú umiestnené na zadnej strane.
Na záver sú pripojené motory a vložená batéria.

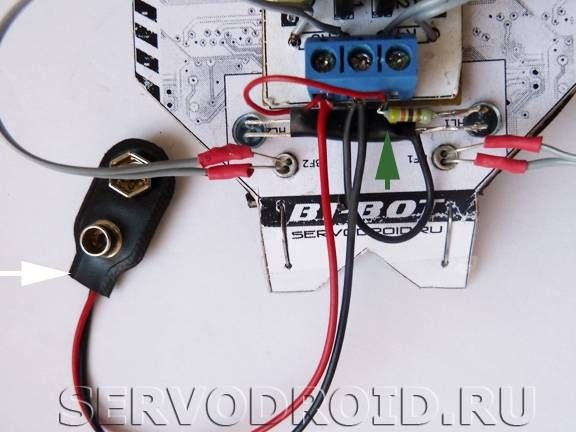

To je všetko, robot je pripravený. Teraz ju môžete skúsiť zapnúť a nakonfigurovať na požadované podmienky.