Počas svojho vzdelávania autor hral na telefóne hry s podporou akcelerometra. Skutočne rád riadil auto po telefóne jednoduchým naklonením a potom začal snívať o tom, že v skutočnom živote vyrobí auto s rovnakou kontrolou. Teraz mám Arduino a po nadobudnutí programovacích zručností je čas na počítači so systémom Android vytvoriť riadený počítač, ktorý nazval Hercules.
Toto meno dostala kvôli obrovskému krútiacemu momentu a vysokej rýchlosti. model je možné ovládať pomocou telefónu s Androidom cez Bluetooth. Akýkoľvek telefón s týmto operačným systémom je vhodný na ovládanie, autor neobmedzuje jedno diaľkové ovládanie. Tiež som pomocou telefónu ušetril peniaze, pretože som nemusel utrácať peniaze za vytvorenie diaľkového ovládača.
Materiály a náradie:
- Arduino Uno
- Bluetooth transceiver
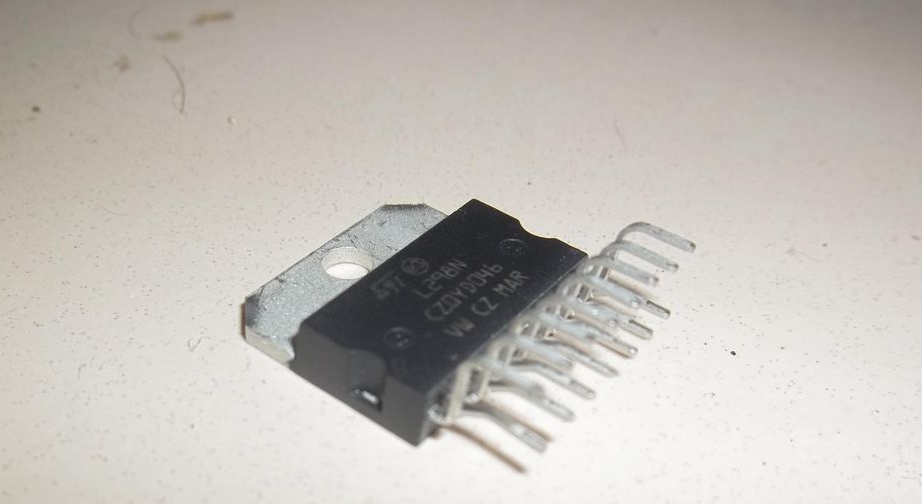
- Vodič s dvoma motormi (s mostom L298 H)
- Motory s prevodmi 4 ks (výkon sa volí v závislosti od použitia stroja)
- Kolesá 4 ks
- Batéria 1 Ah SLA 12V
- Základňa pre komponenty (podvozok)
- doštička
- Škatule na uloženie 4 ks
- Prepínač SPST
- Spojovacie vodiče pre Arduino
- Spájkovacie drôty
- Matice a skrutky malej veľkosti
- Rezistor 10 kOhm 1 ks
- Rezistor 20 kOhm 1 ks
- Android telefón
- spájkovačka
- spájka
- spájkovacia pasta
- vŕtačka





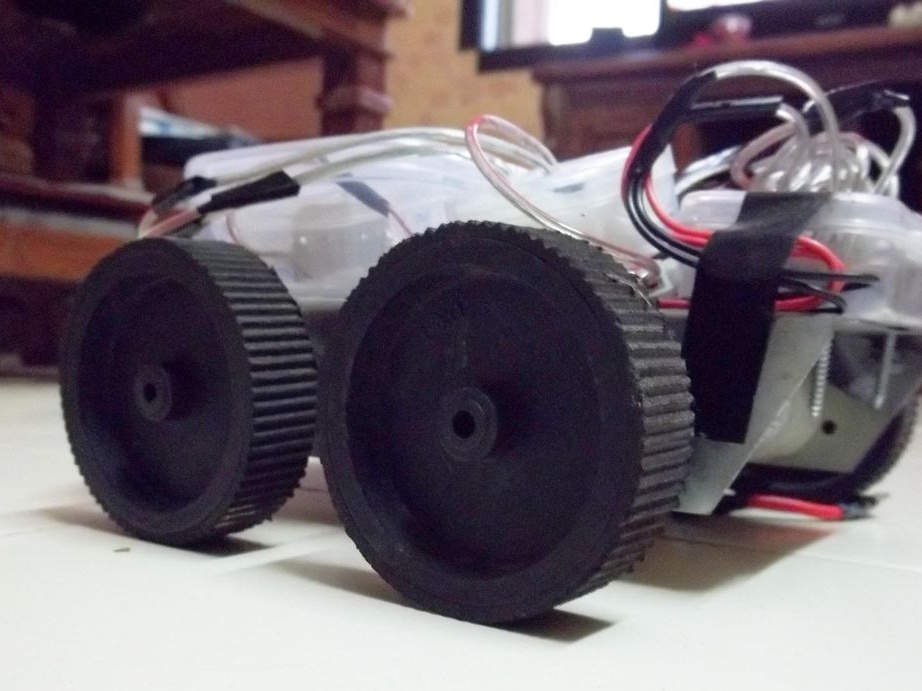
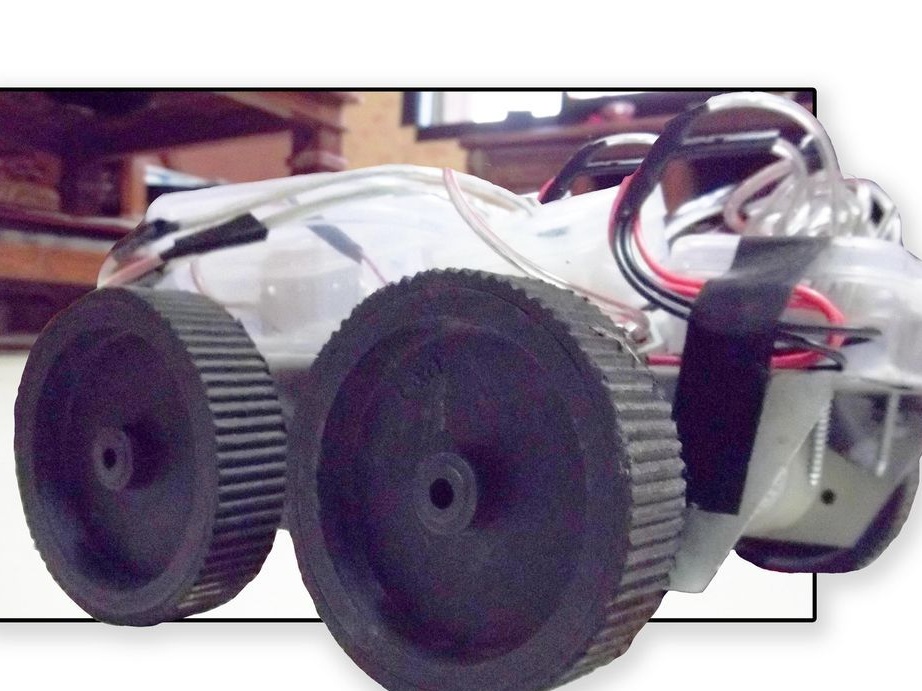
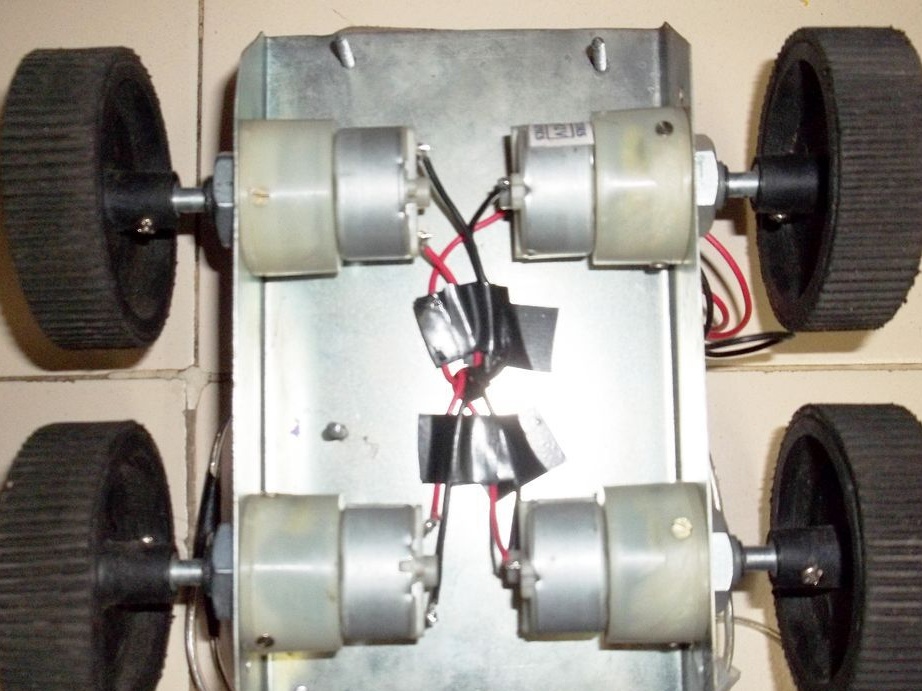
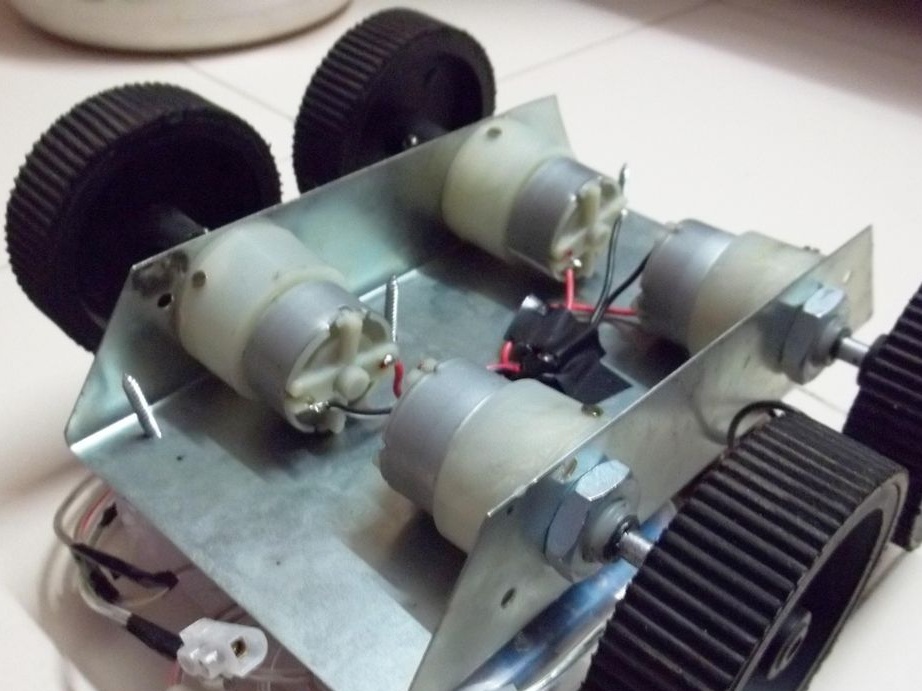
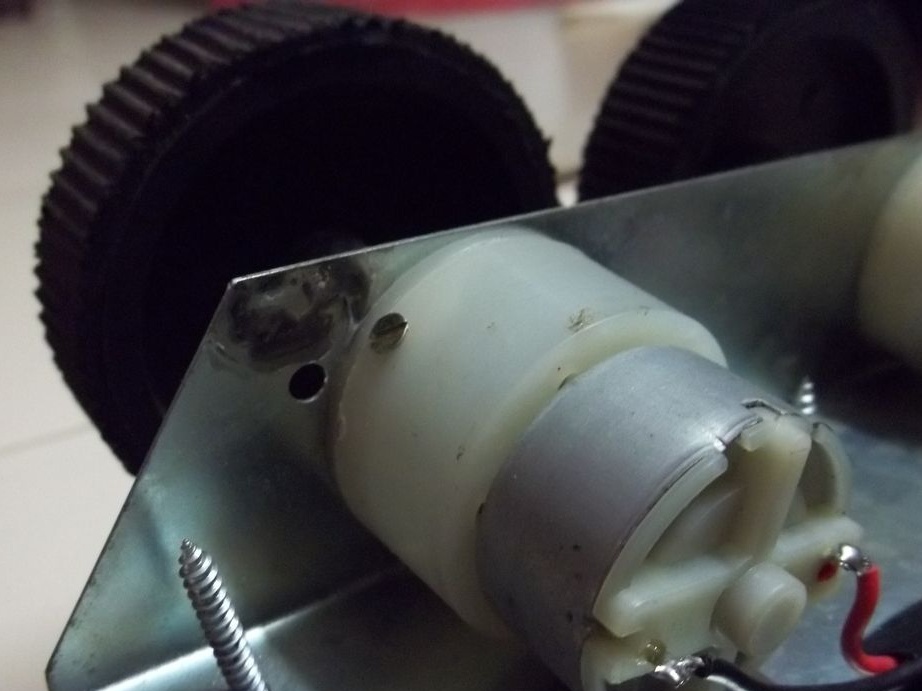
Prvý krok. Kolesá a podvozky.
Skrutky motora uľahčili ich inštaláciu na podvozok pomocou matíc. Kolesá sú namontované až po hriadeľ motora. Dva pravé motory sa zapínajú navzájom paralelne, ako aj dva ľavý. Ako podvozok vyzerá po inštalácii štyroch kolies a motorov, môžete vidieť na fotografii nižšie.
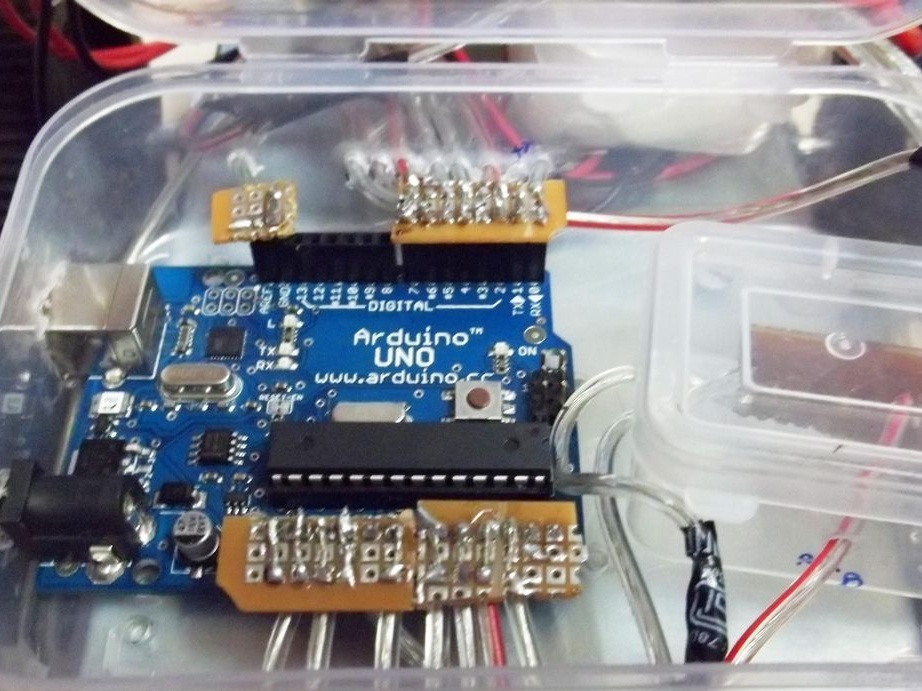
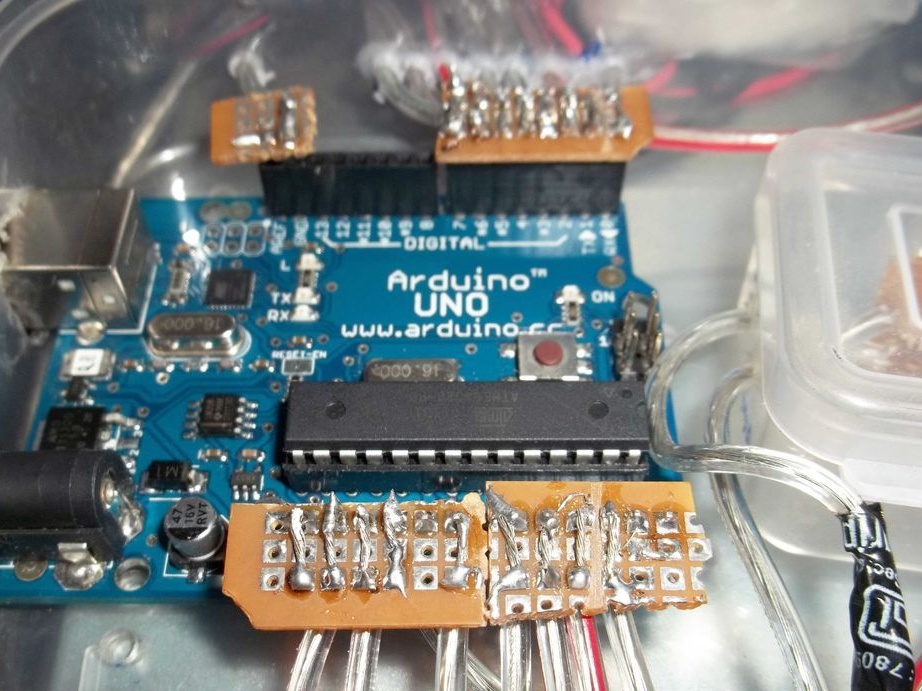
Krok dva Bývanie pre Arduino.
Schéma prípadu pre Arduino je rozdelená do niekoľkých častí. Takéto modulárne riešenie pomôže v budúcnosti podporovať obvod alebo eliminovať možnú poruchu. Ak sa niektorá zo zložiek pokazí alebo zhorí, môže sa rýchlo vymeniť a bez toho, aby došlo k narušeniu dizajnu. Box pre Arduino bol vytvorený takto:
- Štyri časti boli odrezané z doštičky, dve z nich s otvormi veľkosti 8x3, druhé dve časti 6x3.
- Kolíky BLS boli spájkované na každú dosku na dlhej strane.
- Každý kolík na doštičke bol dodatočne spájkovaný s drôtmi dlhými asi 10 cm, čo sa uskutočnilo tak, aby sa z Arduina neodstránili drôty, pretože teraz sa zaťaženie začalo rovnomerne rozdeľovať.
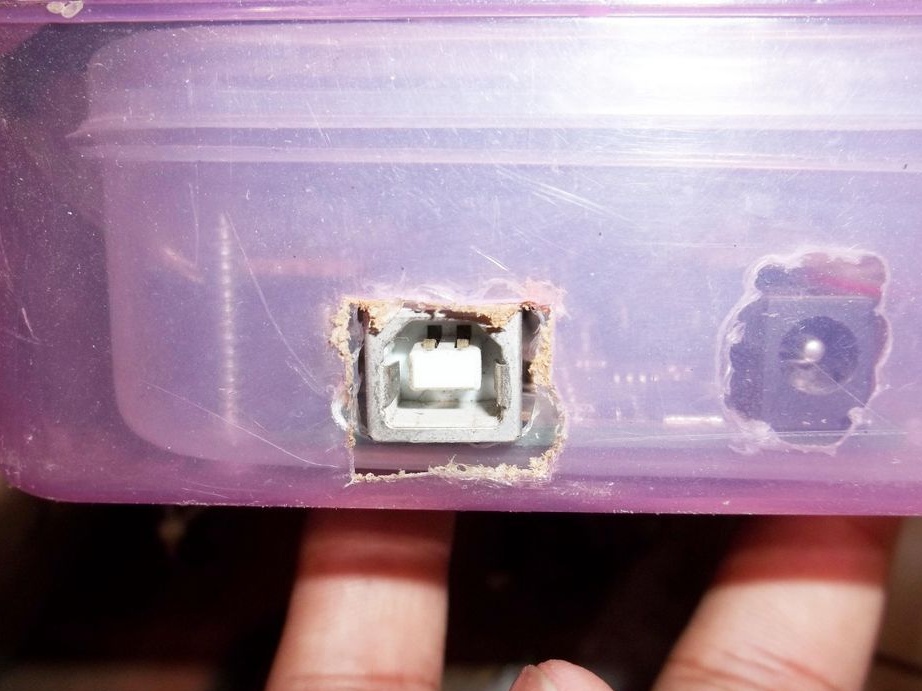
- Ďalej bola do puzdra umiestnená doska Arduino tak, aby sa výstup USB dotkol steny. Pre tento výstup bola vyrezaná diera, čo pomôže načítať ďalšie programy do stroja alebo vykonať opravy existujúcich programov. Na bokoch škatule boli vyrezané otvory pre drôty, ktoré vychádzajú z dosky. Ďalšie otvory boli vyrezané v spodnej časti škatule pod Arduino montážnymi konektormi.


Krok tri Vysielač Bluetooth.
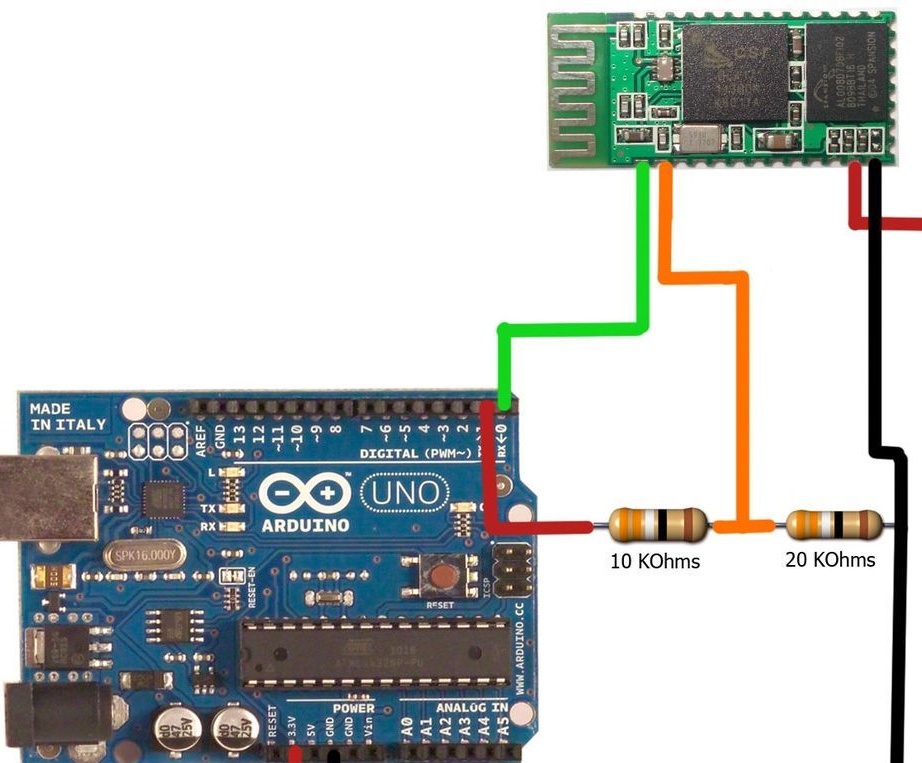
Spájkovanie drôtov k Bluetooth transceiveru je najnáročnejšou úlohou pri zostavovaní tohto projektu, autorovi pri spájkovaní chýbala tretia ruka. Boli použité štyri vodiče dlhé 10 cm, ktoré boli spájkované na kolíky 1 (Tx), 2 (Rx), 12 (+ 3,3 B) a 13 (GND). Teraz mohol byť vysielač a prijímač umiestnený v kryte s vopred pripravenými otvormi pre drôty. Autor nalepil drôty do skrinky, aby zabránil odtrhnutiu drôtov z kontaktov.



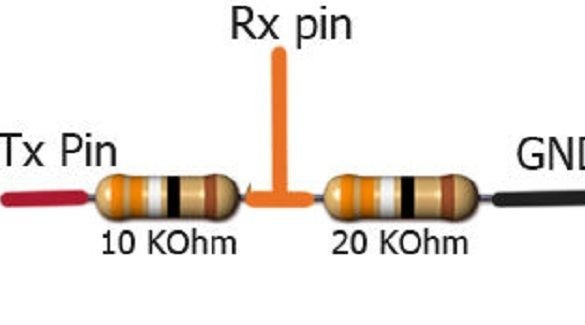
Štvrtý krok. Kryt pre odpory.
Pretože výstup Arduino Tx vysiela signál s napätím 5 V a modul Bluetooth pracuje s napätím 3,3 V, bolo potrebné previesť 5 V na 3,3 V. Na túto úlohu autor použil delič napätia. Podľa obvodu poskytnutého nižšie, spájal rezistor so zvyšným kúskom doštičky. Samozrejme, bolo možné dať tento obvod do prípadu Arduino, ale nebolo tu dosť miesta, takže autor vytvoril samostatný rezistor.


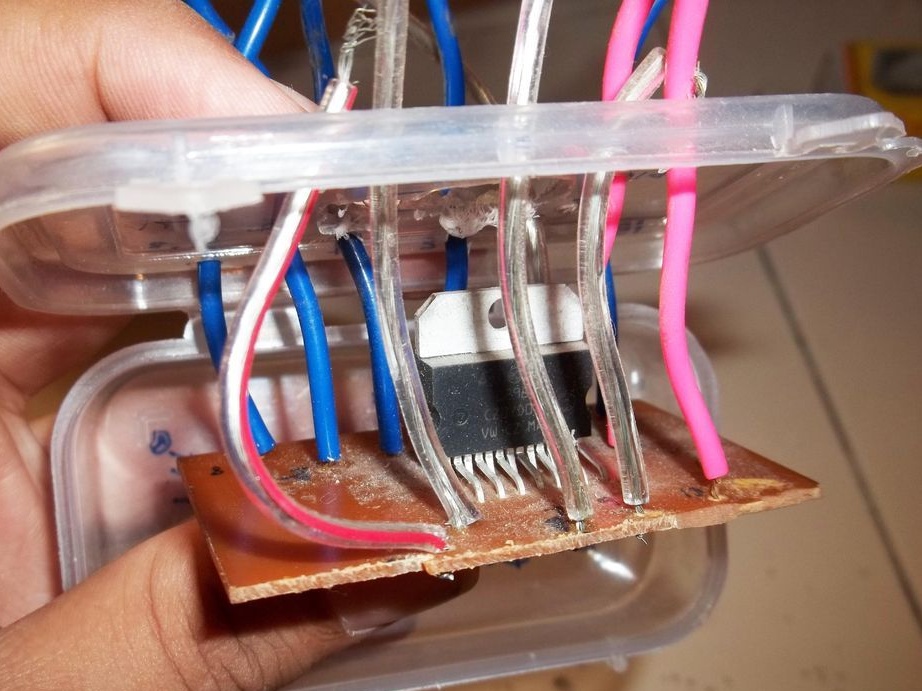
Krok 5 Vodič motora.
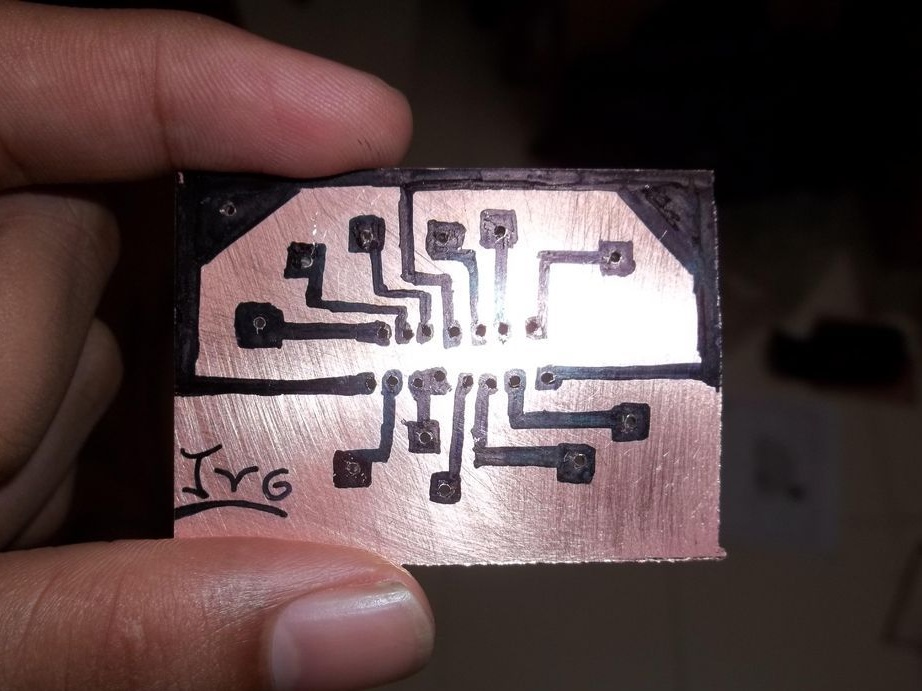
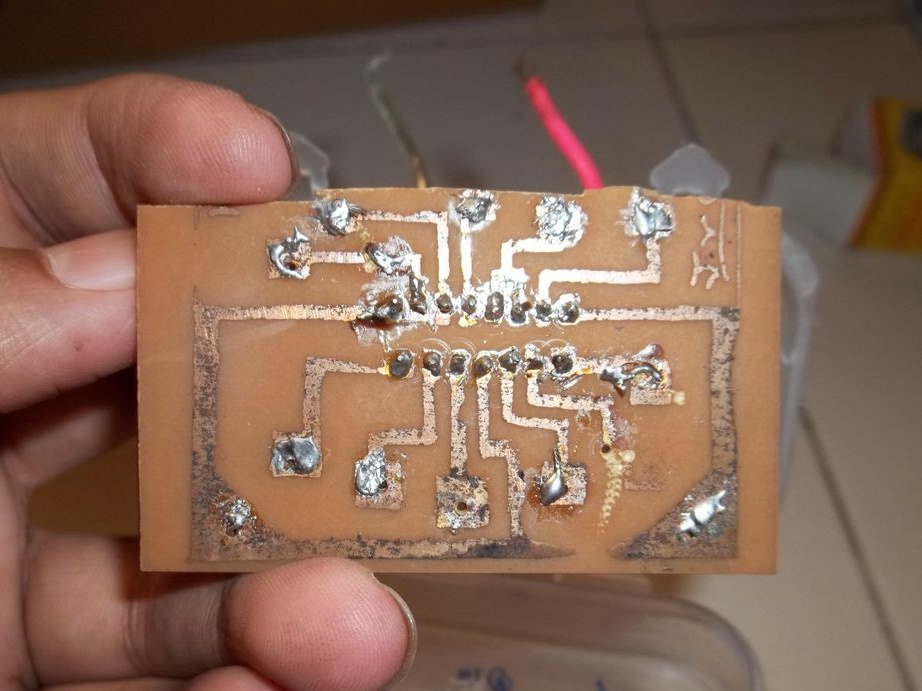
Autor používa dvojitý vodič s H-mostíkom L298 IC, riadi štyri motory. Autor pre neho vytvoril tabuľu na uľahčenie spájkovania drôtov, samotnú tabuľu na fotografii nižšie. Po spájkovaní bol vodič tiež umiestnený v samostatnom puzdre s otvormi pre drôty.
Krok 6 Konečná montáž.
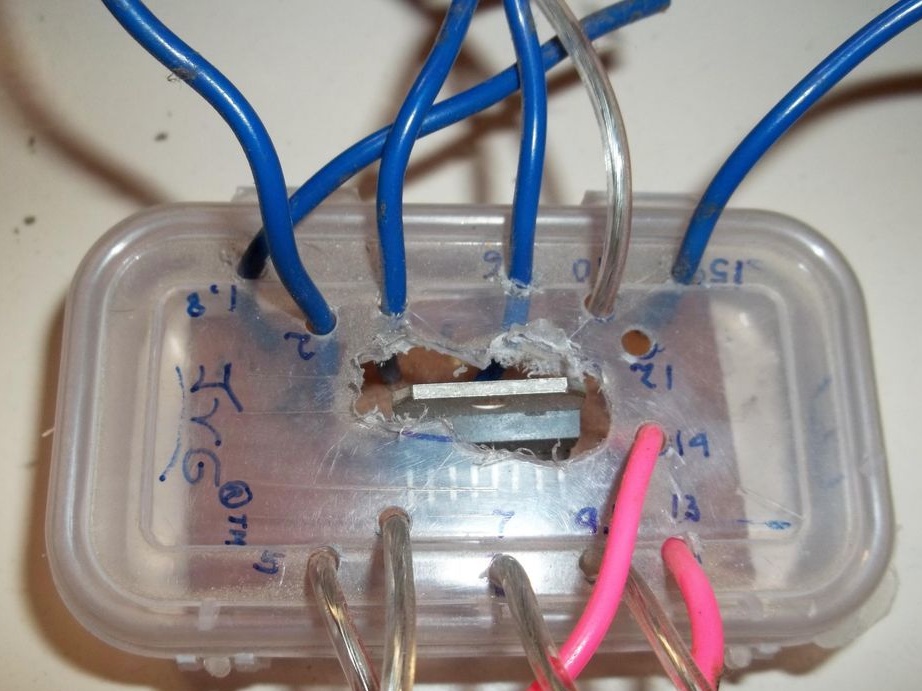
Každý jednotlivý komponent je pripojený k Arduino v súlade so schémou.
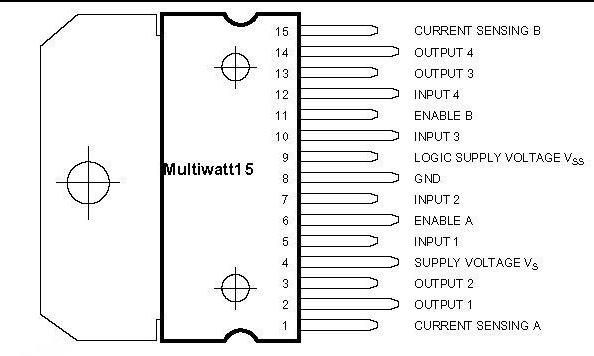
Spojenie vodiča motora s Arduino sa uskutočnilo podľa tohto pinout:
1 až GND
2 k prvému kontaktu ľavých motorov
3 k druhému kontaktu ľavých motorov
4 až 12V batéria
5 na pin Arduino 2
6 ku kolíku Arduino 3
7 na pripnutie Arduino 4
8 GND
9 až 5V s Arduino
10 na pripnutie Arduino 5
11 na pin Arduino 6
12 na čap Arduino 7
13 k prvému kontaktu správnych motorov
14 na druhý kontakt správnych motorov
15 až GND
Napájanie 12V bolo pripojené k vývodu Vin 4 Arduino a vývodu 4 L298. GND Arduino resp. Napájanie GND.
Siedmy krok. Program pre Arduino.
Aby program pracoval správne, bolo potrebné nainštalovať knižnicu Amarino, ktorú je možné stiahnuť. Zdrojový kód pre Arduino si môžete stiahnuť v článku.
Krok osem. Softvér pre Android
Knižnica Amarino je súprava nástrojov pre prácu so smartfónmi s Androidom. Inštaláciou ďalšej aplikácie do telefónu môžete začať písať program.
Amarino aplikáciu a plugin si môžete stiahnuť z. Po ich inštalácii do telefónu zostalo iba zariadenie zapnúť a pripojiť sa k nemu a vyberte časť Pridať udalosti-> Akcelerometer Sensor.
Video s inštaláciou Amarino a jeho doplnkov:
Rýchlosť stroja sa rovná sile telefónu. Ak sa stroj pohybuje nesprávnym smerom, musíte vymeniť káble z motorov.